






源码地址:https://github.com/nalin1096/path_planning
路径规划
使用ROS实现了基于RRT路径规划算法。
发行版 - indigo
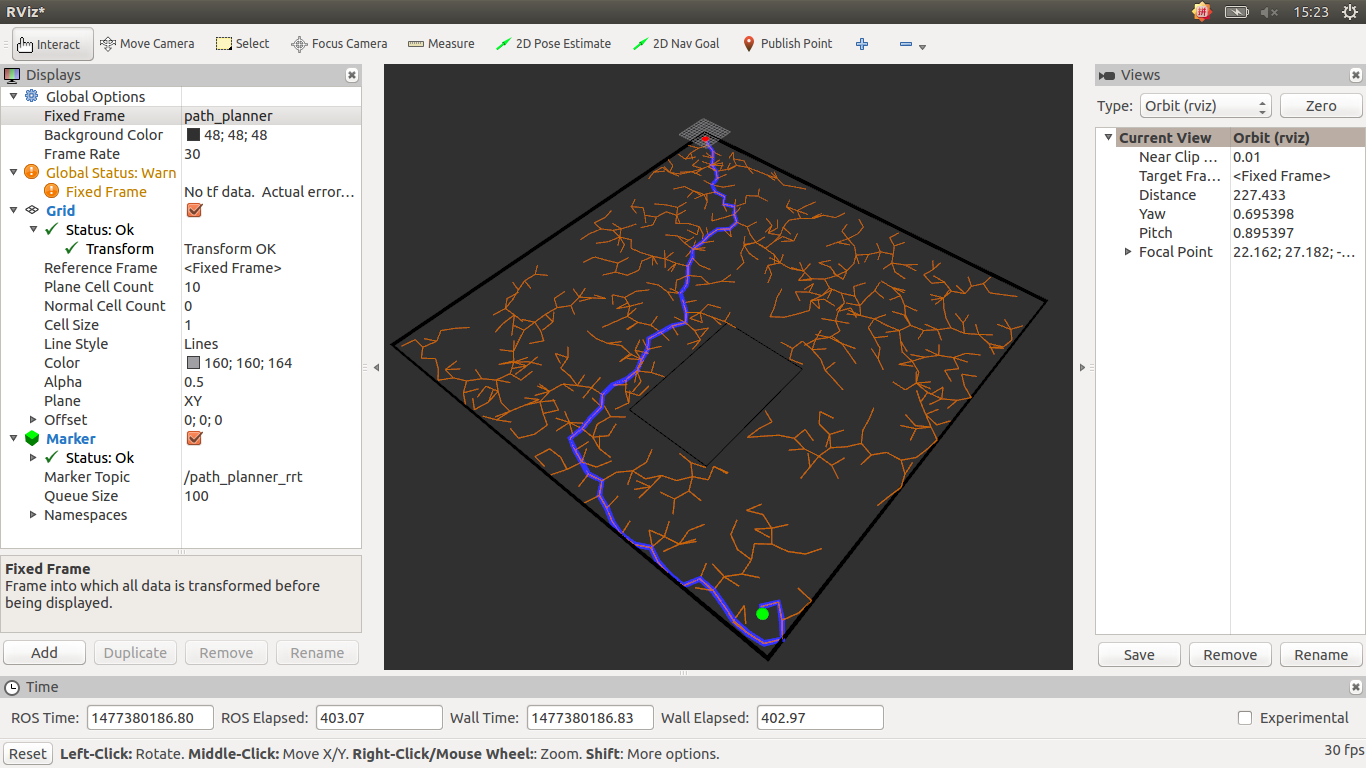
算法在有一个障碍的环境找到优化的路径。算法可视化在RVIZ完成,代码是用C ++编写。
包有两个可执行文件:
1 ros_node2 env_node
RVIZ参数:
1 Frame_id =“path_planner”
2 marker_topic =“path_planner_rrt”
说明:
- 打开终端,输入
- $ roscore
- 打开新的终端并转到catkin工作区:
- $ catkin_make
- $ source ./devel/setup.bash
- $ rosrun path_planning env_node
- 打开新的终端
- $ rosrun rviz rviz
- 在RVIZ窗口,更改:
- 在全局选项固定框架“path_planner”
- 添加标记和标记改变主题,以“path_planner_rrt”
- 打开新的终端
- $ rosrun path_planning rrt_node















 4153
4153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









