







卡尔曼的基本原理以及公式网上有很多,可以参照大神博客:
卡尔曼主要在传感器上应用较多,因为传感器的噪声误差是无法避免的,如果不进行滤波等处理,噪声带来的误差只会越来越剧烈,或者导致数据根本没法使用等情况。
为了更好的理解卡尔曼,我对大神的代码稍微整理了一下并加了注释,方便阅读,但是噪声我没有用高斯噪声,这里的代码主要是对位移做了跟踪。位移到设定只是一个简单的1/2a*a哈
#include <iostream>
#include<Eigen/Core>
#include<Eigen/Dense>
#include<string>
#include<vector>
#include <cmath>
#include <limits>//用于生成随机分布数列
#include <stdlib.h>
#include <random>
using namespace std;
using namespace Eigen;
using Eigen::MatrixXd;
int main()
{
const double dt=0.1;//采样时间
const int MAX=500;//最大迭代次数
double acc=0.2;//加速度 也是公式中的uk
double theta_t;
vector<MatrixXd> X_now;//实际位移矩阵存入这个容器中
/*第一个公式中的变量矩阵/容器*/
vector<MatrixXd> X_k;MatrixXd Xk=MatrixXd::Constant(2,1,0);X_k.push_back(Xk);
vector<MatrixXd> X_k_1;MatrixXd Xk_1=MatrixXd::Constant(2,1,0);X_k_1.push_back(Xk_1);
/*第二个公式中的变量矩阵/容器*/
vector<MatrixXd> P_k;MatrixXd Pk=MatrixXd::Constant(2,2,0);P_k.push_back(Pk);
vector<MatrixXd> P_k_1;MatrixXd Pk_1=MatrixXd::Constant(2,2,0);P_k_1.push_back(Pk_1);
/*第三个公式中的变量矩阵/容器*/
vector<MatrixXd> K_K;MatrixXd K=MatrixXd::Constant(2,2,0);K_K.push_back(K);
/*第四个公式中的变量矩阵/容器*/
vector<MatrixXd> Z_measure;MatrixXd Zk=MatrixXd::Constant(1,1,0);Z_measure.push_back(Zk);
/*公式五里没有新的变量矩阵*/
//把系数确定好
MatrixXd A(2,2);
MatrixXd B(2,1);
MatrixXd H(1,2);
A(0,0)=1;A(0,1)=dt;A(1,0)=0;A(1,1)=1;
B(0,0)=(dt*dt)/2;B(1,0)=dt;
H(0,0)=1;H(0,1)=0;
//把噪声以及固定值确定好
MatrixXd Q(2,2);//过程激励噪声协方差,假设系统的噪声向量只存在速度分量上,且速度噪声的方差是一个常量0.01,位移分量上的系统噪声为0
Q(0,0) = 0;
Q(1,0) = 0;
Q(0,1) = 0;
Q(1,1) = 0.01;
MatrixXd R(1,1);
R<<10;
MatrixXd I=MatrixXd::Identity(2,2);
//确定变量矩阵
MatrixXd X(2,1);//实际位移值
double noise_random;//随即噪声
//定义时间信息tehta_t
vector<double> time(1000, 0);
// int i;
for(int i = 0; i < MAX; i++)
{
time[i] = i * dt;
// cout<<time[i]<<endl;
theta_t =time[i];
X(0,0)=1/2*acc*theta_t*theta_t ; //实际位移,以后会用来求测量值Zk
X(1,0)=0;
X_now.push_back(X);
}
/*开始进入迭代*/
for(int i = 1; i < MAX; i++)
{
/*第一个公式*/
Xk=A*X_k_1[i-1]+B*acc;
X_k.push_back(Xk);
/*第二个公式*/
Pk=A*P_k_1[i-1]*A.transpose()+Q;
P_k.push_back(Pk);
/*第三个公式*/
MatrixXd tmp(1,1);
tmp=H*P_k[i]*H.transpose()+R;
K=P_k[i]*H.transpose()*tmp.inverse();
K_K.push_back(K);
/*第四个公式*/
Zk=H*X_now[i];
Z_measure.push_back(Zk);
Xk_1=X_k[i]+K_K[i]*(Z_measure[i]-H*X_k[i]);
X_k_1.push_back(Xk_1);
/*第五个公式*/
Pk=(I-K_K[i]*H)*P_k[i];
P_k_1.push_back(Pk);
}
}
OK。现在我们有了一个卡尔曼滤波的代码模板了,我们知道,只要找到参考值,再依次用代码变现五个公式,再迭代,就能得到一个效果较好的预估值了。现在我拿IMU来进行练手卡尔曼滤波。主要融合陀螺仪和加速度计两个传感器。
那么,问题来了,什么是融合?
个人理解,融合就是,用A传感器比较准确的值去校准B传感器不太准确的值来达到互补的效果。这个A,也就是你觉得比较准确到值,就是卡尔曼滤波中所谓的测量值!!!!
我们知道IMU的加速度计有误差,如果盲目积分误差会累积的非常大,但是瞬时值是准确的。陀螺仪得到的角速度也是如此,如果想得到角度,直接用角速度积分的话,角度值只会越来越漂。
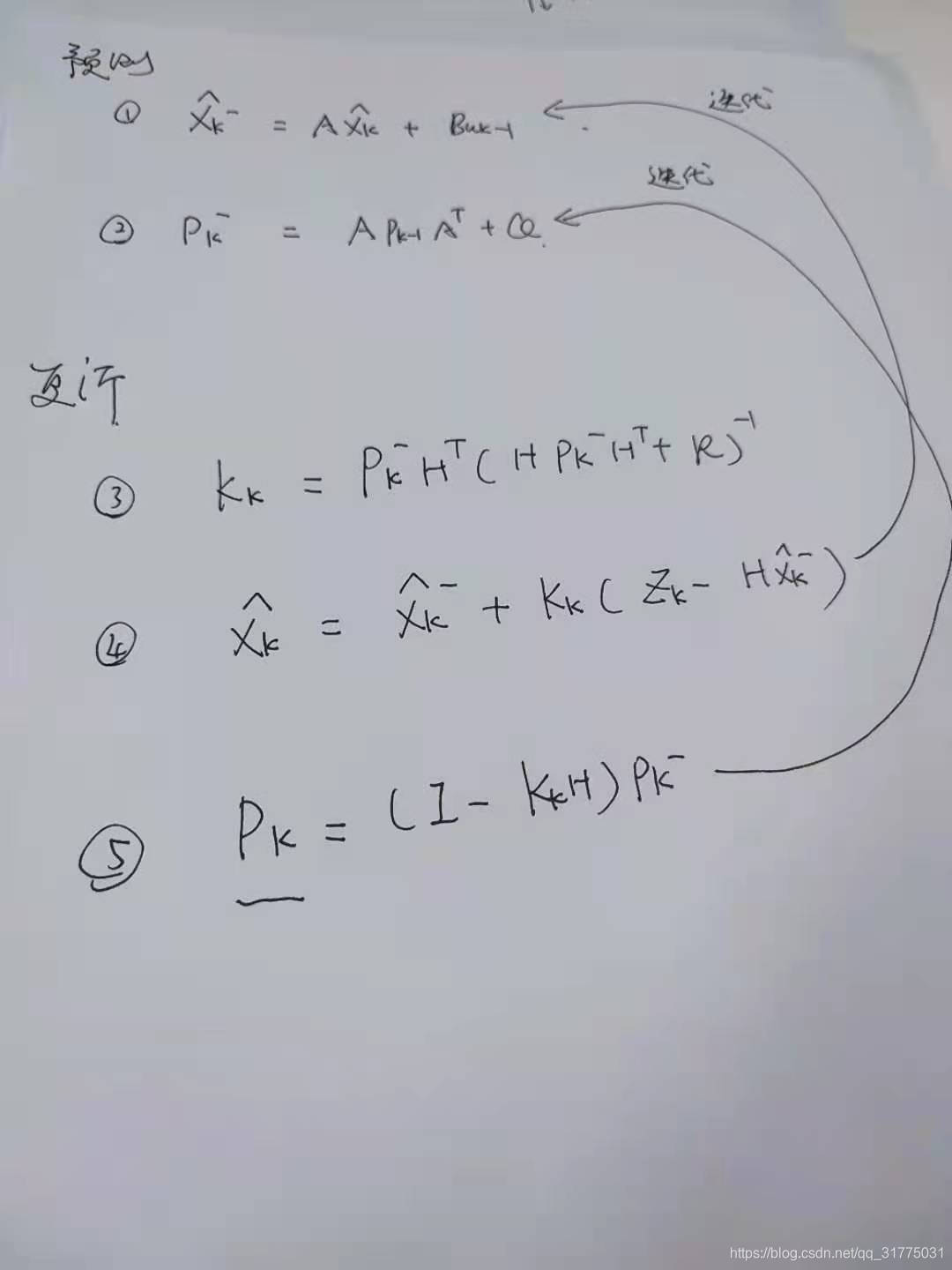
卡尔曼滤波,包括一些类似最小二乘法,高斯牛顿法等等一些优化算法,本质都是为了去除掉误差对实际工程的影响。使我们得到的值无限接近于真实值,个人理解,这就是卡尔曼以及其他一些优化算法最核心的功能,而卡尔曼就是另一种形式的优化。现在我们来好好瞻仰一下这5个公式
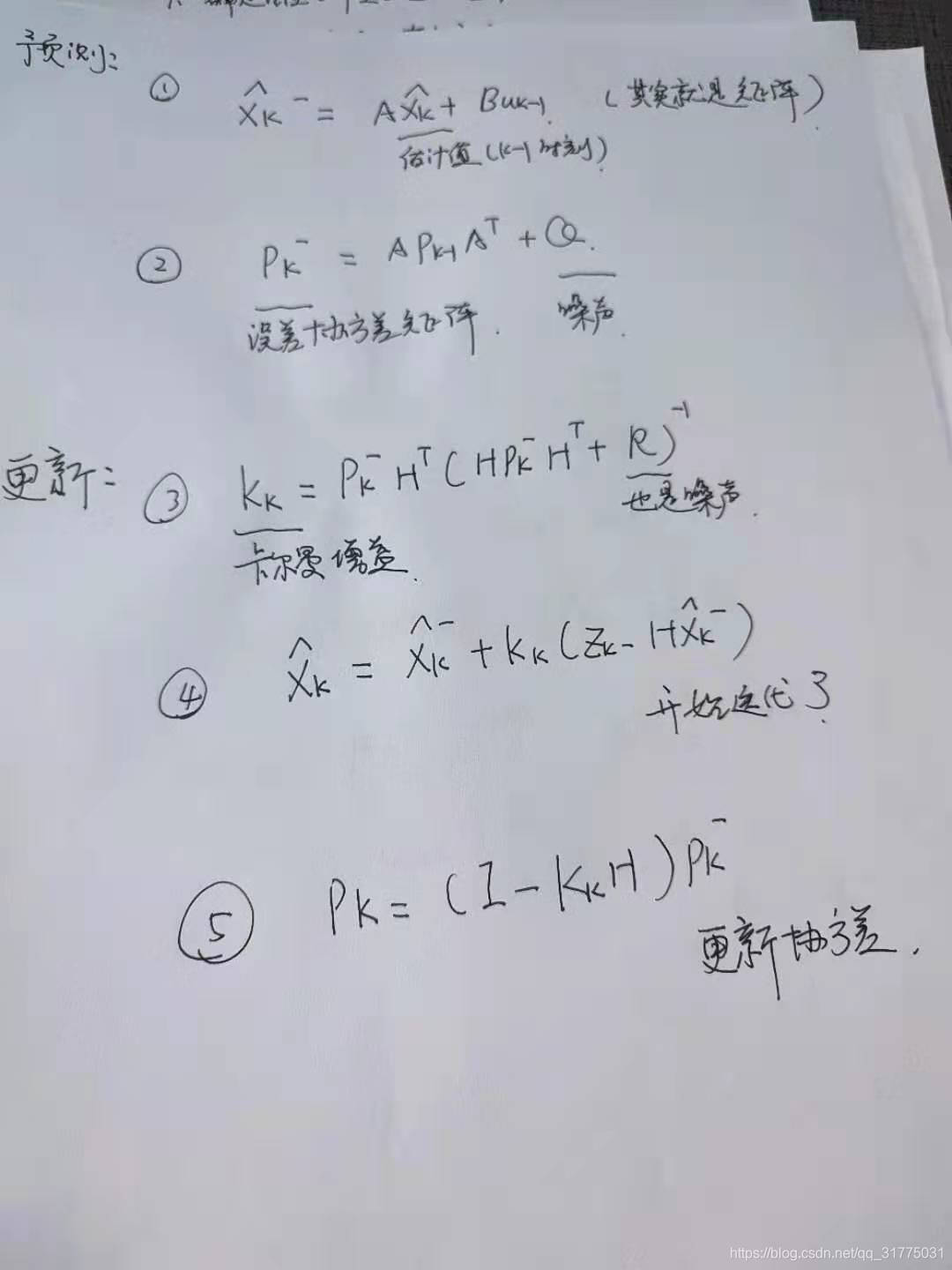
预测的第一个公式:
把具体的数学模型转换成矩阵的形式,我们先明确我们要求啥。在IMU中,我们要求的是一个具体的横滚角的值theta。注意这个theta如果按照角速度积分的形式进行求解只会越累计越大,这时候卡尔曼就会帮助我们解决累计误差过大的问题。
OK,继续,现在我们的求解矩阵中有了一个值theta了,要不要再加一个呢?这里,我又加了一个量——bias,也就是累计误差的罪魁祸首,惯导的偏差值。bias属于IMU误差模型中的一项,很随机,但是符合高斯分布。(这里我想说一下,个人觉得随机噪声可以近似等于高斯噪声,因为完全随机的模型即为高斯模型)。好了,现在我们有了两个值了,一个是待求解的量theta,一个是我们永远无法得知的偏差值bias。变成矩阵吧:
好了,现在我们矩阵的左端已经搞定了,现在整理一下theta和bias的公式然后得到一个完整的时序性的矩阵,我们知道,角度的估计值满足以下方程:
角度此刻估计值=上一时刻角度估计值+(当前角速度-bias)*dt
也就是: theta(k)=theta(k-1)+(angle(k)-bias)*dt
可以变成矩阵形式:
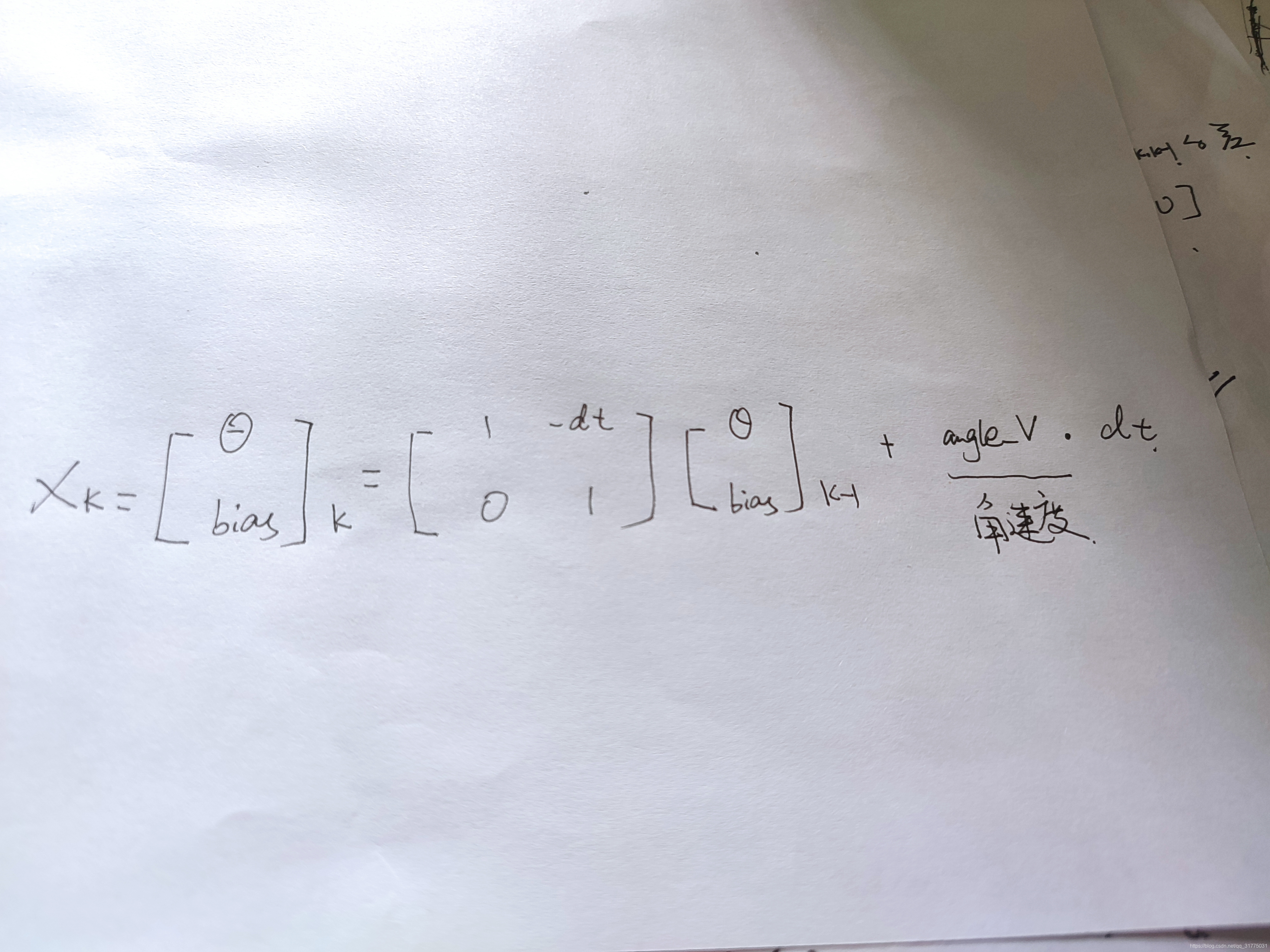
OK,现在我们有了第一个方程啦,庆祝!!!代码对应公式,如下:
Xk_1(0,0)=(angle_V-imu.bias)*(t-1)*0.04;
Xk_1(1,0)=imu.bias;
X_k_1[0](0,0)=Xk_1(0,0);
X_k_1[0](1,0)=Xk_1(1,0);
A<<1,imu.dt*t,0,1;
B<<imu.dt*t,0;
Xk=A*X_k_1[t-1]+B*angle_V;
X_k.push_back(Xk);预测的第二个公式:
我们开始求解协防差矩阵啦!我们知道,卡尔曼滤波只有5个公式,其中两个是预测公式,预测公式的特点就是会在更新步骤中被更新,然后再反馈回去,完成迭代。协防差矩阵就是那个不幸的被更新的选手。
协防差矩阵,又名误差协防差矩阵,它在卡尔曼滤波中参与了两个操作
1. 参与了卡尔曼增益的计算
2. 和角度估计值一样,被无情的更新了。
代码中的Pk,我给了它一个初始值,因为后续它还是会被更新的,所以初始值不是太奇怪就行。
代码如下:
Pk=A*P_k_1[t-1]*A.transpose()+Qk;
P_k.push_back(Pk);公式如下:
问题来了,Q取多少?
个人理解,Q属于噪声,可以先设置一个数值较小的矩阵,后续再根据滤波结果来调节。但是Q越大,代表设计的卡尔曼效果越差。(噪声会不会也是一种补偿呢?)
OK,现在我们有两个公式了,继续继续!!!!!
更新的第一个公式:
这一步,我们要开始求卡尔曼增益了,公式如下:
多了个H,你是不是就糊涂加懵X了? 这里的H,其实就是为了防止矩阵相乘出错的存在,比如,我们不能让2×1的矩阵和2×1的矩阵相乘,这个H就是起到了把2×1变成1×2的作用。
这个R也是个噪声。
代码如下:
MatrixXd tmp(1,1);
tmp=H*P_k[t]*H.transpose()+R;
K=P_k[t]*H.transpose()*tmp.inverse();
K_K.push_back(K);更新的第二、三个公式
卡尔曼增益的存在,就是为了更新我们的估计值的,估计的次数多了,估计也就慢慢等于实际值(测量值)了。
公式可以参考上面的图哈,这里的Zk就是测量值了,也就是起到校准作用的值,第三个公式更新了我们的估计值,第四个公式估计了协防差,在更新协防差时多了个I矩阵,没有传感器属性的矩阵,我给它设置成了单位矩阵。
公式流程走完了,就可以开始迭代了,注意矩阵下标不要越界,就可以写好代码了。迭代指示如下:
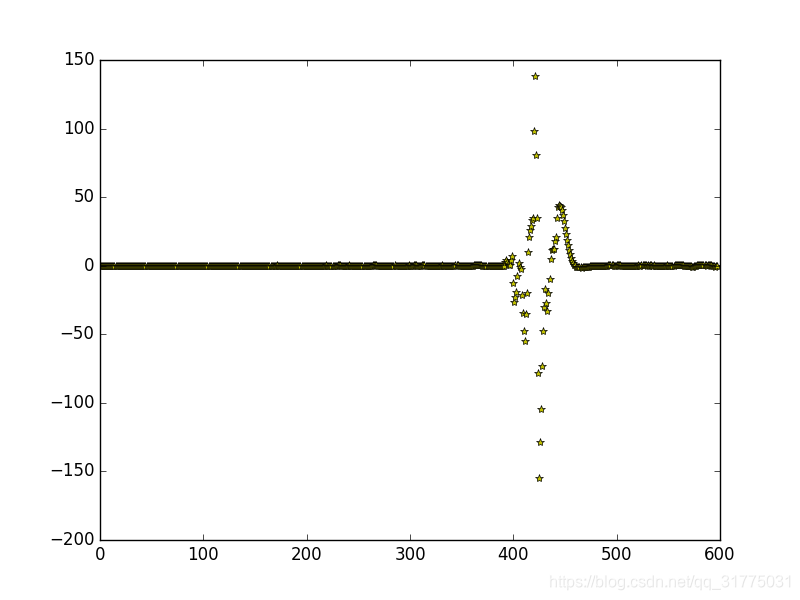
最后的卡尔曼效果如下,纵坐标=实时的估计值-实时的测量值,波动部分是人为给的随机干扰:
完整代码参考我的gitee:https://gitee.com/angry-potato/imu-kalman


















 6744
6744

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











