






【数据包处理】
用的别人的数据包,建图的时候图跳来跳去,是tf冲突了,liosam发布了,bag包也发布了。所以我过滤了一下数据包。
保留单个话题
rosbag filter my.bag 123.bag "topic == '/tf'"
过滤单个话题
rosbag filter my.bag 123.bag "topic != '/tf'"
保留多个话题
rosbag filter kitti_2011_10_03_drive_0027_synced_10hz.bag 123.bag "topic == '/kitti/velo/pointcloud' or topic == '/kitti/oxts/imu' or topic == '/tf_static' or topic == '/tf' or topic == '/kitti/oxts/gps/fix' or topic == '/kitti/oxts/gps/vel'"
还有截取时间的过滤方法。
参考https://blog.csdn.net/qq_40528849/article/details/130008537
【保存地图】
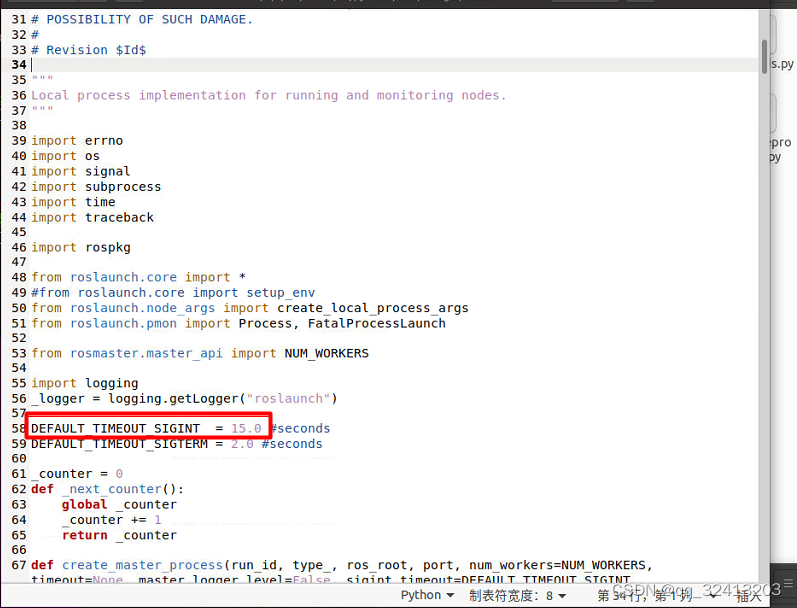
- 有的时候地图比较大,我们需要调整一下_TIMEOUT_SIGINT这个参数。将15改成60.
sudo gedit /opt/ros/noetic/lib/python3/dist-packages/roslaunch/nodeprocess.py
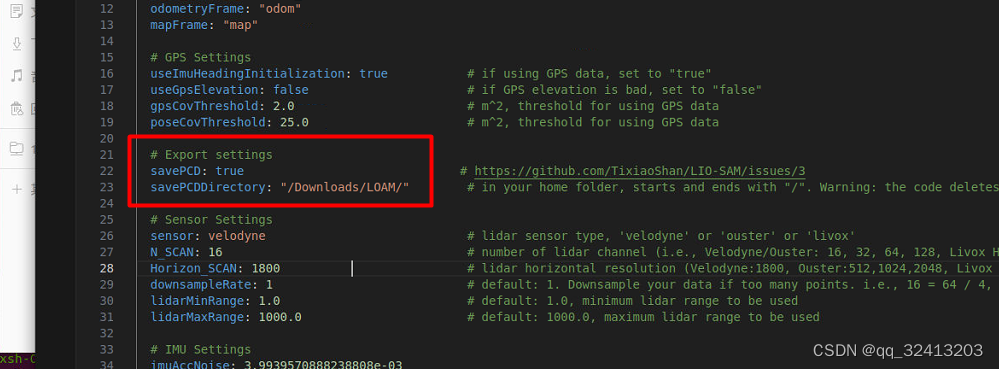
- 需要修改配置文件config/params.yaml文件的参数:
savePCD: true # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/zoe/ws_lio_sam/src/LIO-SAM/map"
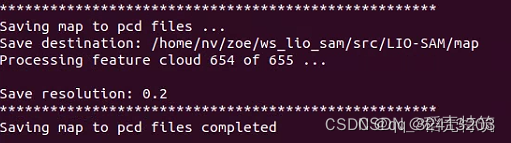
- 保存地图:
source devel/setup.bash
rosservice call /lio_sam/save_map 0.2 "zoe/ws_lio_sam/src/LIO-SAM/map"

- note:要注意,程序会自动添加/home/user头。
如果没有那个文件夹,会自动创建那个文件夹,然后把文件放进去。
如果有那个文件夹,会删除那个文件夹。要注意。
下一阶段开始处理纯定位方面研究,liosam算法已经跑通了,待定位部分处理完就开始回来继续研究liosam源码















 959
959

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









