







 本文详细介绍了LIO-SAM中如何使用GTSAM进行因子图优化,涉及先验因子、预积分因子和帧间约束因子的构建,以及ISAM2优化器的使用。着重展示了IMU预积分阶段和后端优化中GTSAM的应用过程。
本文详细介绍了LIO-SAM中如何使用GTSAM进行因子图优化,涉及先验因子、预积分因子和帧间约束因子的构建,以及ISAM2优化器的使用。着重展示了IMU预积分阶段和后端优化中GTSAM的应用过程。
前言:
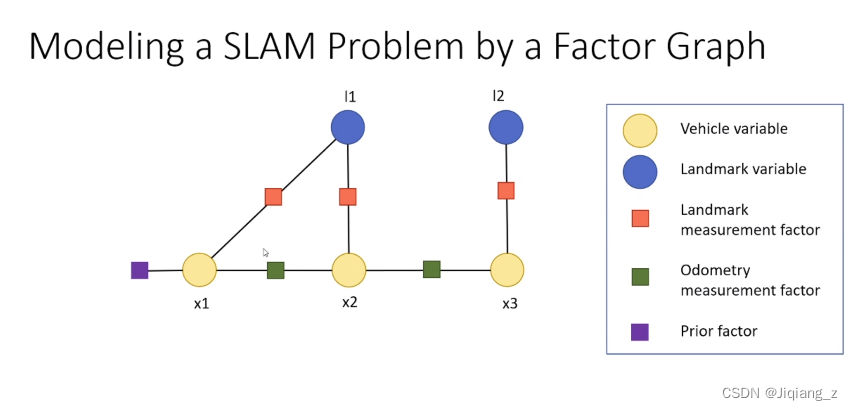
因子图优化和BA优化、位姿图优化一样,其本质都是解决非线性优化的问题。如果只有路标和位姿之间的因子,和BA优化完全一样。不过因子图是个大筐,什么约束都能加,IMU,轮速计,GPS。
在当前估计点处求导展开转换成线性矩阵用GN方法或者LM求解。
因子图优化常用的库有GTSAM,使用GTSAM解决因子图优化问题的经典SLAM代码有LIO-SAM。
关于因子图优化的讲解可以看深蓝学院的视频公开课:
因子图的理论基础与在机器人中的应用 - 深蓝学院 - 专注人工智能与自动驾驶的学习平台
视频公开课的笔记可参考以下文章:
因子图优化原理(iSAM、iSAM2论文解析)-CSDN博客
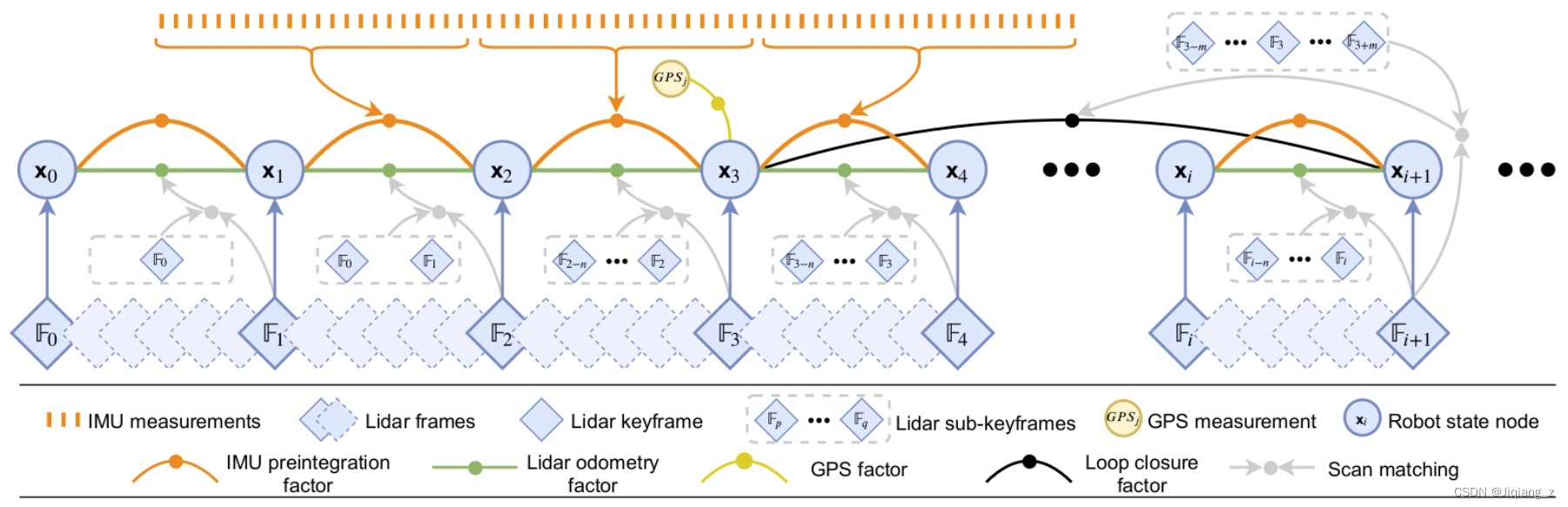
下面来分析一下LIO-SAM中如何用GTSAM来解决优化问题。LIO-SAM中一共用到了两个因子图优化器,一个是IMU预积分阶段进行的因子图优化,另外一个是后端阶段进行的因子图优化。
IMU预积分阶段-因子图优化:
LIO-SAM中的因子图如下图所示:
先来看一下LIO-SAM中使用了哪些类型的gtsam因子:
// 1.先验因子 3个参数(变量节点,先验值,协方差矩阵)
gtsam::PriorFactor
// 2.预积分因子 6个参数
//(上一时刻位姿节点,上一时刻速度节点,当前时刻位姿节点,当前时刻速度节点,上一时刻偏置节点,预计分量)
gtsam::ImuFactor
// 3.Between因子 4个参数(上一时刻变量节点,当前时刻变量节点,节点之间的约束,协方差矩阵)
gtsam::BetweenFactor因子图中的因子类型上主要分为两类,一种是先验因子,一种是帧间约束因子。
1.定义因子图变量
gtsam中 ISAM2因子图优化器、因子图因子对象、因子图状态变量对象 的定义
// ISAM2因子图优化器,ISAM2 是一种增量式因子图优化算法
gtsam::ISAM2 optimizer;
// 因子图的因子(约束)对象,该对象用于存储构建的因子。
gtsam::NonlinearFactorGraph graphFactors;
// 因子图的状态变量对象(变量的估计值)。
gtsam::Values graphValues;2.重置因子图优化器
重置 ISAM2因子图优化器、因子图因子对象、因子图状态变量对象(在第一帧以及每过100帧重置一次)
/**
* 重置 ISAM2因子图优化器、因子图因子对象、因子图状态变量对象
*/
void resetOptimization()
{
// Step 1 : 重置ISAM2优化器
//ISAM2 优化器的参数配置对象
gtsam::ISAM2Params optParameters;
// 因子图中每次变化超过该阈值时,ISAM2 优化器将重新线性化非线性因子。
optParameters.relinearizeThreshold = 0.1;
// relinearizeSkip 设置为 1,表示每个因子添加到图中后都进行重新线性化。
optParameters.relinearizeSkip = 1;
// 使用optParameters对ISAM2优化器对象进行初始化。
optimizer = gtsam::ISAM2(optParameters);
// Step 2 : 重置因子 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2512
2512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











