






本例程中使用的电机为带霍尔编码器的减速电机,电机由三部分组成:减速器,电机以及霍尔编码器。
霍尔编码器工作原理:霍尔编码器通过电磁转换,将机械的位移转化为脉冲信号,并且输出A、B两相的方波信号,A、B两相脉冲信号相位相差90°,通过检测规定时间内的脉冲数,以及A、B两相脉冲信号的相对位置,便能得到编码器的值与其运动方向。

那么如何测量规定时间内的脉冲数以及两个信号的相位关系呢?
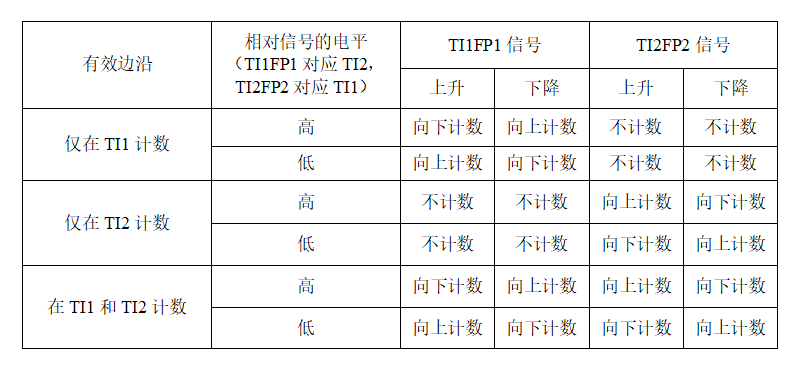
STM32的定时器功能强大,其中部分定时器具有的编码器模式,便可以解决上述问题!通过STM32定时器的编码器模式可以对输入的A、B相信号进行处理。并且STM32的编码器模式可以设置为对TI1、TI2两路信号同时进行脉冲计数,即四倍频!可以提高检测的精度。并且通过检测TI1与TI2的相位关系,计数器可以实现向上计数或向下计数,以此检测其运动方向。
根据本文使用的减速电机参数,电机为11线的霍尔编码器减速电机,减速比为1:30,即转动一圈可以输出11 * 30=330个脉冲,通过STM32四倍频后,电机转动一圈得到的脉冲数为330 * 4=1320,通过定时器中断设置速度采样周期为50ms,即每50ms读取一次定时器中的计数器值。要得到最终的速度,还需要考虑轮胎的大小,根据NANO小车配套的轮胎直径尺寸为65mm,所以周长C为3.14*6.5=20.41cm。参考以上参数,然后便可以计算小车的运动速度。根据测速原理:设采样周期内传入的脉冲数为N,电机转动一圈得到的脉冲数为1320,而轮子转动一圈的运动距离为20.41cm。那么得到脉冲数N时运动的距离S=(0.2041 * N/1320),再除以规定的采样周期时间便可以得到运动的速度,完整的计算公式如下:

















 7418
7418











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









