







日期
2023.6
论文标题
Power Bundle Adjustment for Large-Scale 3D Reconstruction
摘要
We introduce Power Bundle Adjustment as an expansion type algorithm for solving large-scale bundle adjustment problems. It is based on the power series expansion of the inverse Schur complement and constitutes a new family of solvers that we call inverse expansion methods. We theoretically justify the use of power series and we prove the convergence of our approach. Using the real-world BAL dataset we show that the proposed solver challenges the state-of-the-art iterative methods and significantly accelerates the solution of the normal equation, even for reaching a very high accuracy. This easy-to-implement solver can also complement a recently presented distributed bundle adjustment framework. We demonstrate that employing the proposed Power Bundle Adjustment as a sub-problem solver significantly improves speed and accuracy of the distributed optimization.
引用信息(BibTeX格式)
@misc{weber2023power,
title={Power Bundle Adjustment for Large-Scale 3D Reconstruction},
author={Simon Weber and Nikolaus Demmel and Tin Chon Chan and Daniel Cremers},
year={2023},
eprint={2204.12834},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
本论文解决什么问题
大场景BA优化的问题
已有方法的优缺点
Bundle adjustment (BA) 是一个典型的计算机视觉问题,它最小化非线性重投影误差来联合估计相机参数和三维信息。the Normal Equation 是 BA 最耗费时间的步骤。the Schur complement trick 用来形成简化的相机系统 the reduced camera system (RCS),该线性系统只涉及姿态参数,它的大小可以通过使用QR分解进一步减小,只得到RCS的矩阵平方根,然后转化为代数求解问题。然而无论是RCS 还是均方根方程都是通过迭代方法解决,如针对大尺寸的预条件共轭梯度算法或是针对小场景的Cholesky 分解方法。
本文采用什么方法及其优缺点
以the power series expansion of the inverse Schur complement 逆舒尔补的幂级数展开为基础,构成了一类新的求解方法,称之为逆展开法。还可以补充最近提出的distributed BA优化方法。
BA能量方程:
model 与observation 之间差异的所有残差。
Least Squares Problem
采用Levenberg-Marquardt (LM) 算法,是一种基于一阶泰勒展开方法,加入一个约束项进行收敛
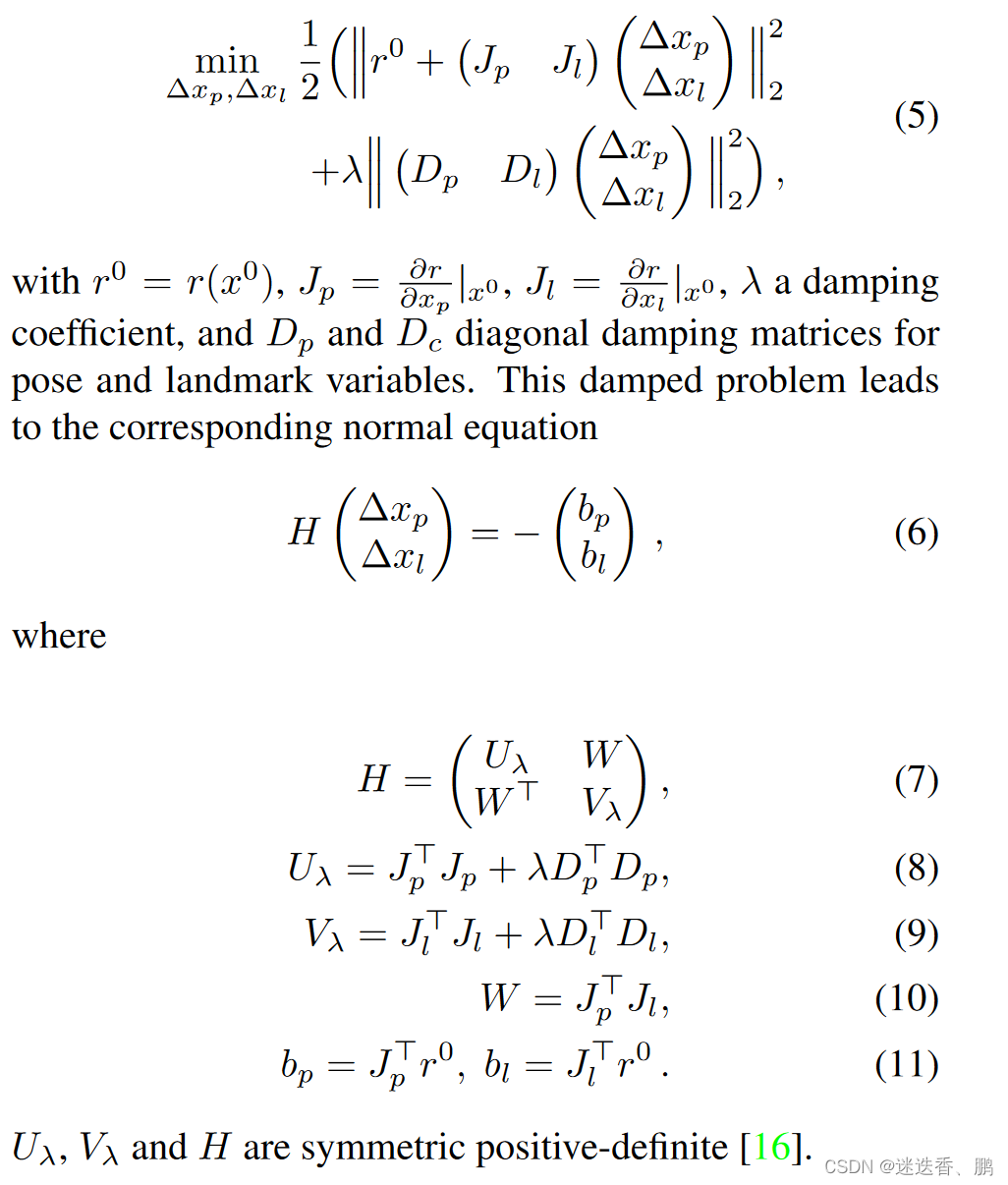
Schur Complement
求解系统矩阵H 的逆对于大规模问题需要耗费很大算力和时间,因此通常使用Schur 来减少算力和时间。
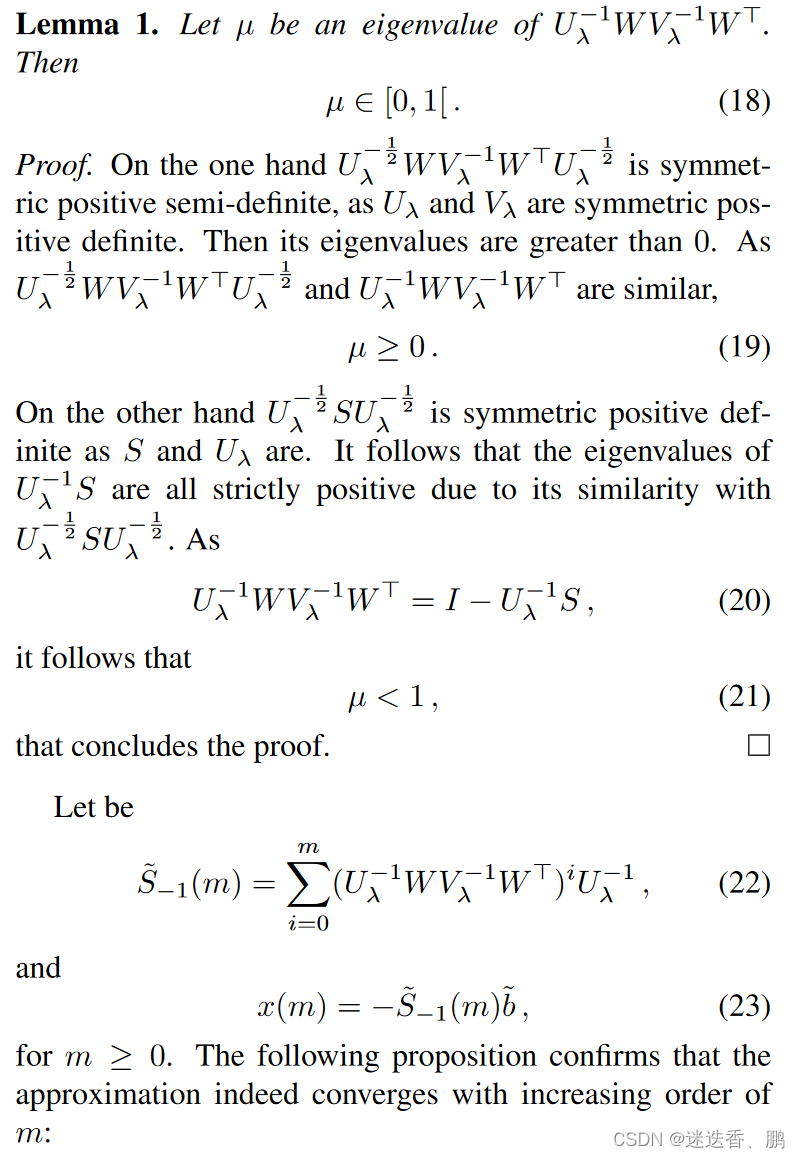
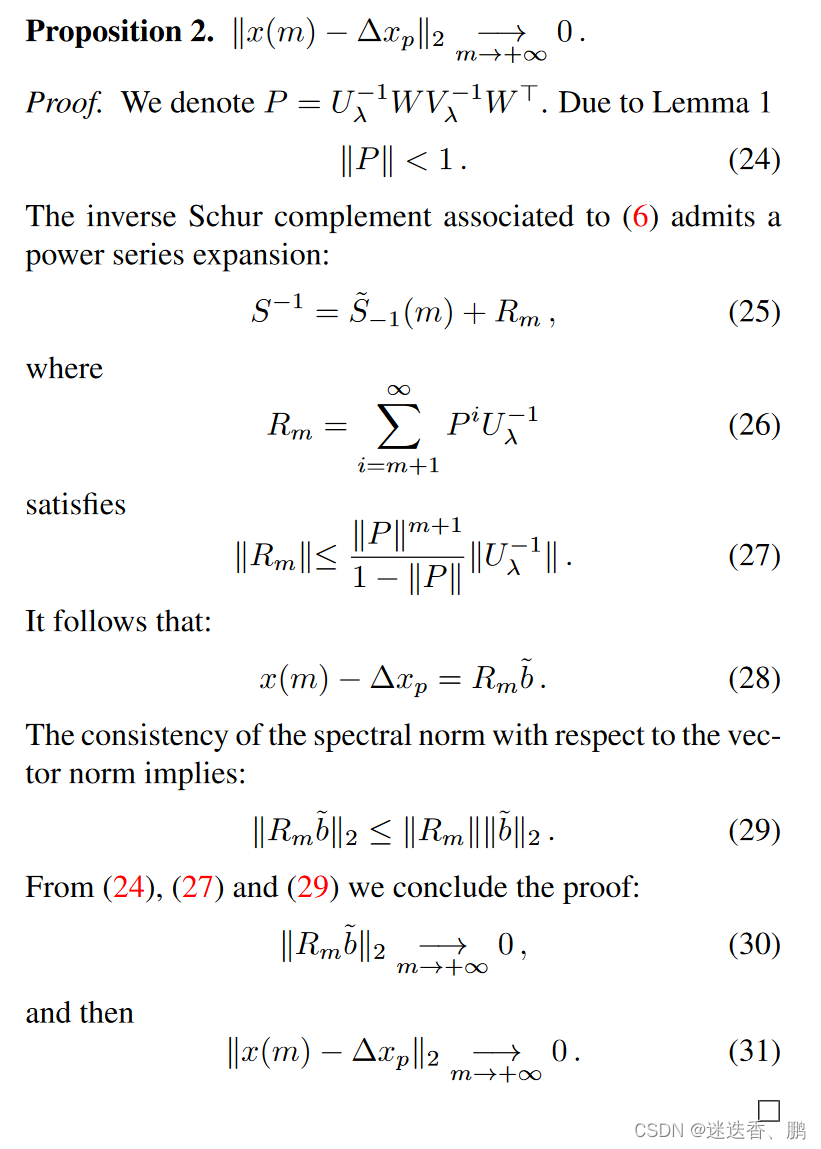
Power Bundle Adjustment
分块矩阵Uλ分解式

导致将逆舒尔补表述为

为了将展开为Lemma .1 中详述的幂级数,我们需要限定

谱半径限定为1。
通过利用BA问题的特殊结构,我们证明了两个结果:
幂级数展开式是迭代导出的,必须有终止规则。通过类比 inexact Newton methods,使得 conjugate gradients algorithm 共轭梯度算法设置了一个停止准则

该准则通过将逆Schur补展开为补阶来保证在位姿更新的细化时幂级数展开停止,
在达到相同阶数时,是否比平均细化小得多

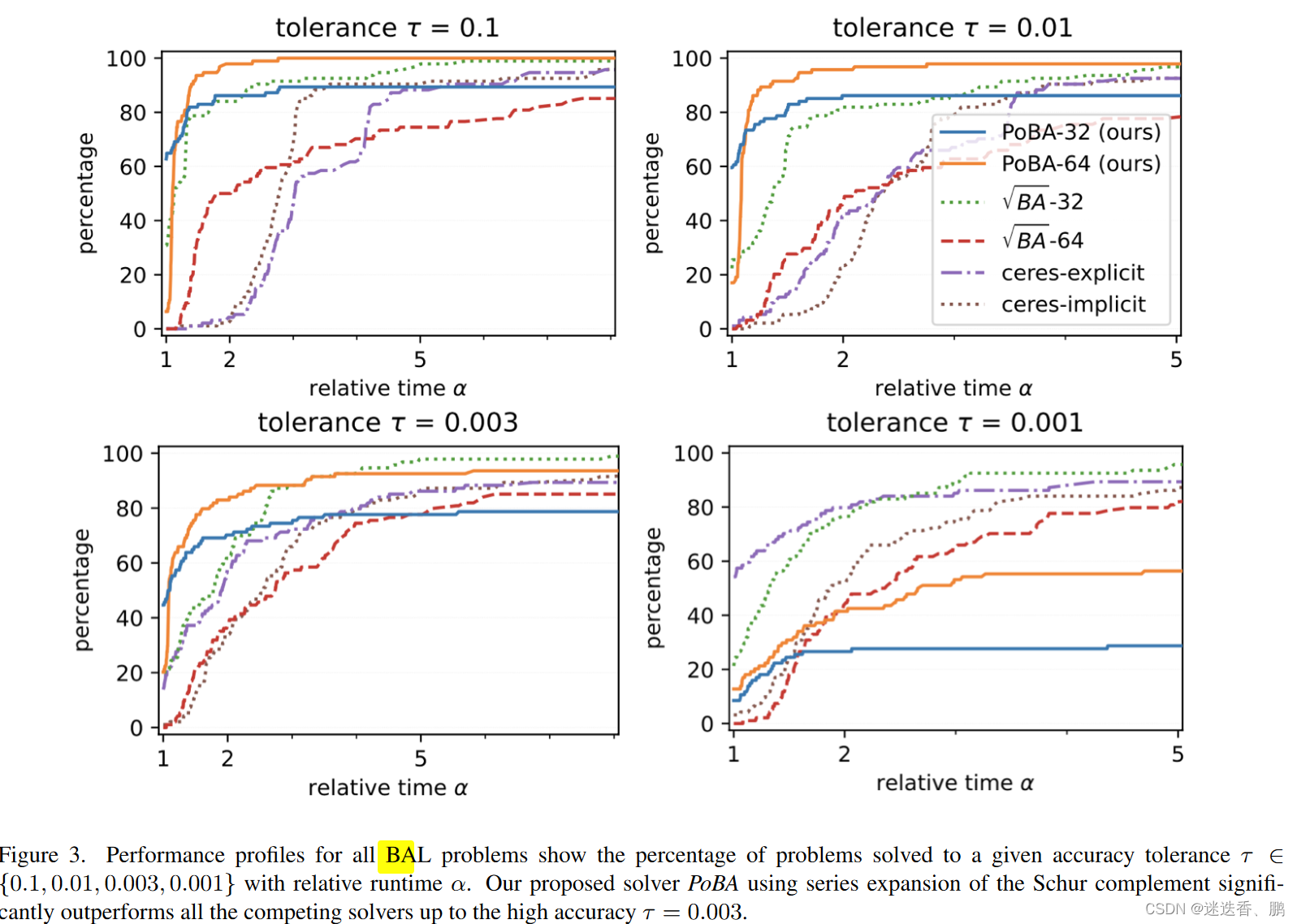
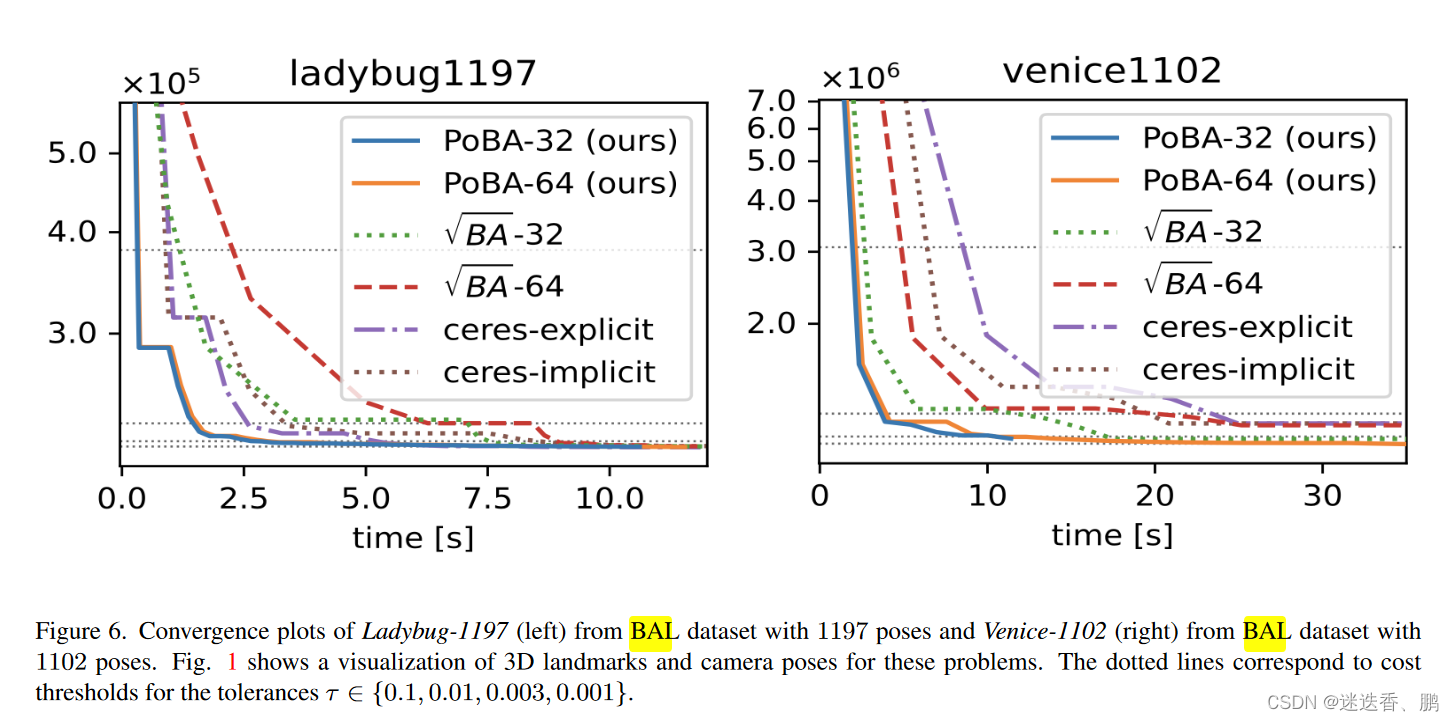
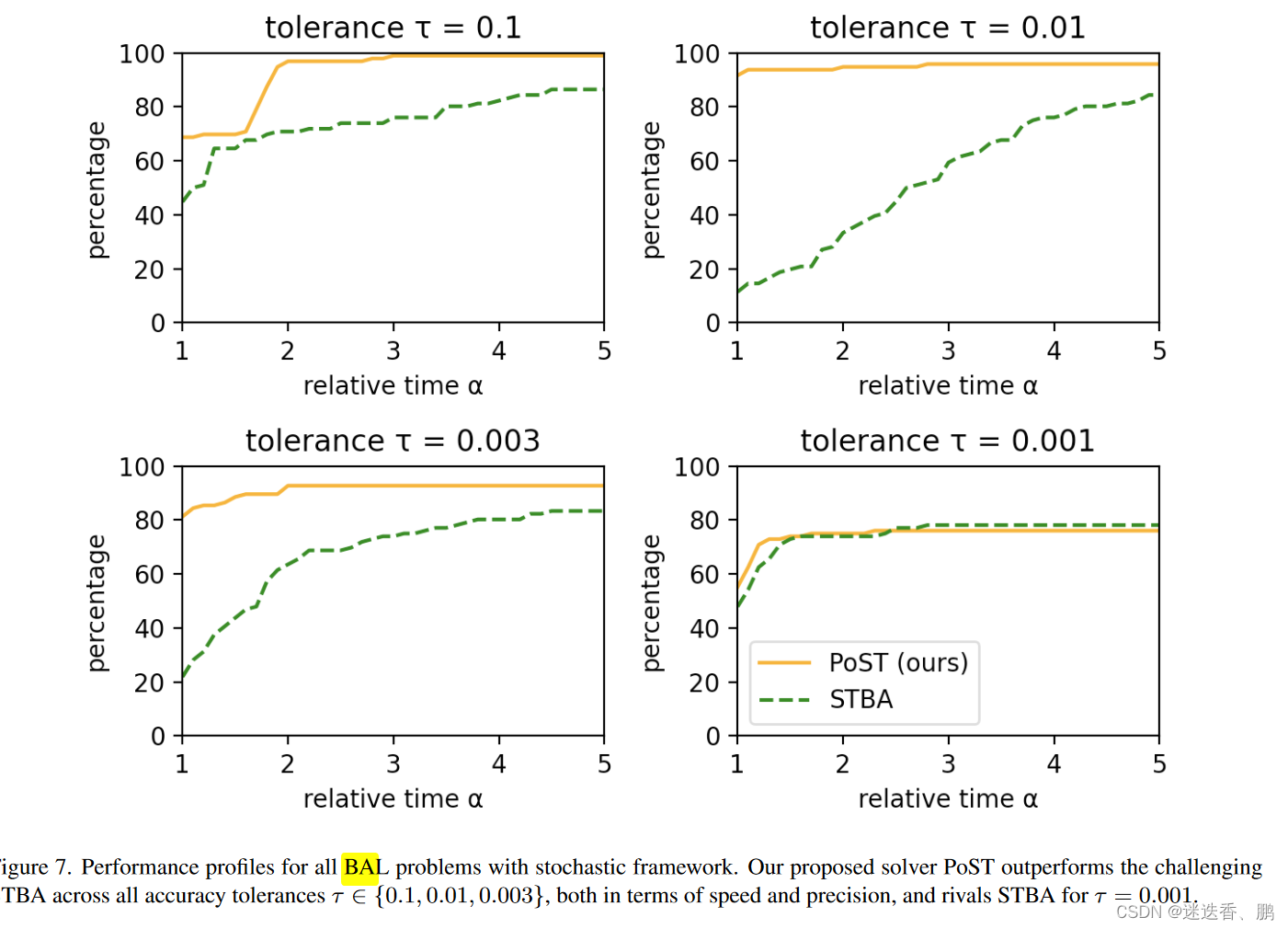
使用的数据集和性能度量
the BAL dataset 中 97个BA优化问题
传感器:Ladybug
威尼斯、特拉法加和杜布罗夫尼克的图片来自Flickr.com,被作为skeletal sets
精度:
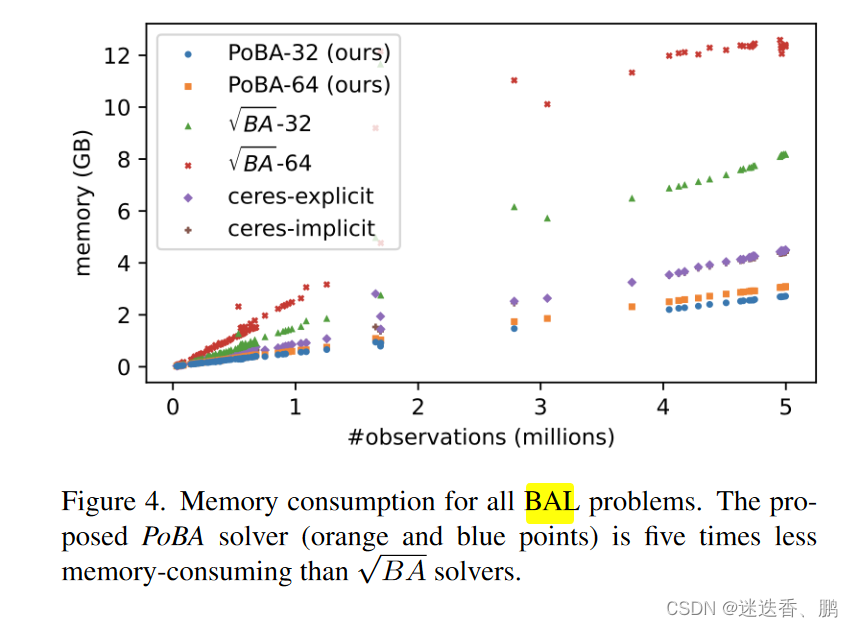
Memory:
两个大小不同的BAL问题的收敛曲线
精度:














 5396
5396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









