







Elmo驱动器 SimplIQ系列可以结合编码器信息,以多种模式控制伺服电机,常用的模式有速度控制模式,力矩控制模式,微步控制模式。实验室使用的场景基本就是速度模式控制伺服电机的旋转,对于四轮独立驱动转向的小车来说,通过改变PWM周期可以达到调速的目的。对于多轴机械臂来说,不仅需要速度控制,还需要以特定的速度模式工作,也就是PVT(position-velocity-time)模式,通过ROS规划的机械臂路径就是包含各轴运动过程的PVT数据。所以我们可以通过将ROS规划的路径经过三次样条插补得到一条更加平滑的路径(https://blog.csdn.net/qq_34935373/article/details/98482706),然后将数据处理成elmo驱动器的PVT模式下的控制指令或者程序(多条指令特定集合),更加精确的控制伺服电机。
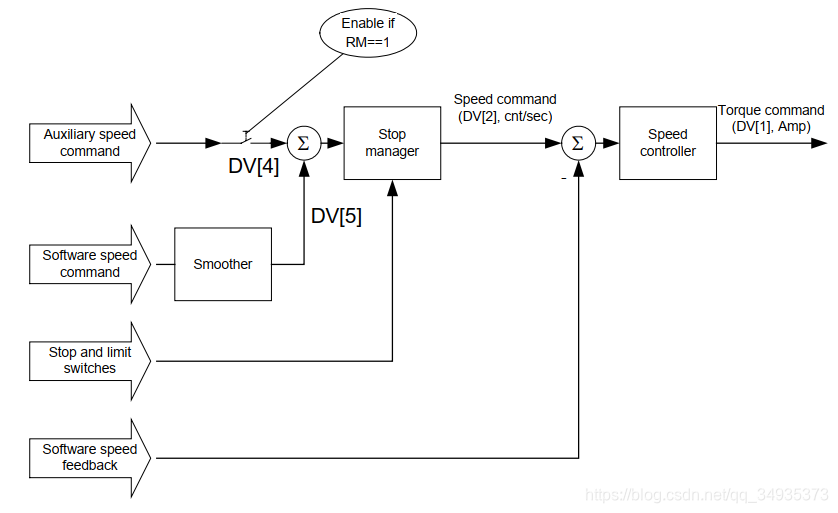
首先介绍驱动器速度模式下的指令,如下所示是速度环反馈过程,反馈的参数在电机调试过程中确定,详见之前博客或者参考手册。
速度模式下不可避免要设计到速度和加速度等信息,特别在机械臂的运动过程中,对各轴的加速度是有限制的,ELMO驱动器中有特定的指令可以帮助我们设置最大加速度和减速度的限制,如下所示,JV是设置速度的指令,让电机以特定的速度持续运动,PM和SF后面的PVT控制也需要用到,BG指令是命令开始执行,如果有新的程序或指令上传到了驱动器,那么开始执行程序。
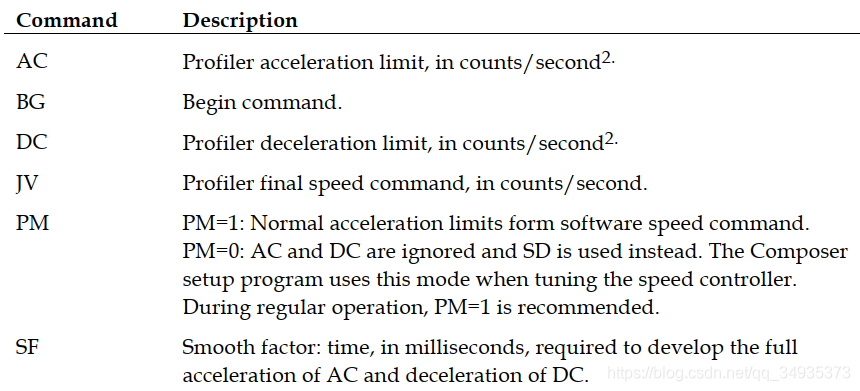
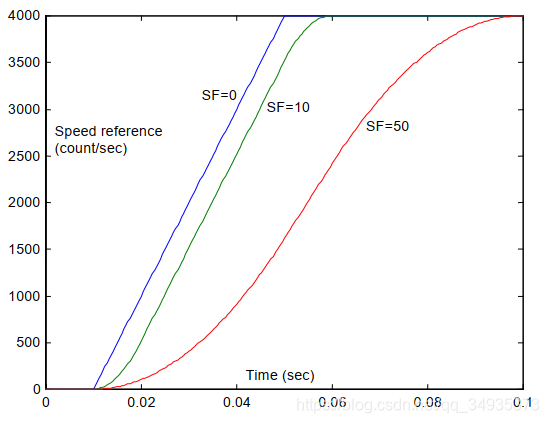
PM上述描述说的很清楚了,推荐使用PM=1;最后一个指令SF是用来平滑加速度的,如下所示,分别使用SF=0;SF=10;SF=50查看速度的曲线可以看出,SF较小的时候,速度是有抖动了,当SF较大的时候,速度非常平滑,但是到达指定速度所用时间更长,响应更慢。
接下来重点说明机械臂所使用的PVT控制模式,当然除了PVT模式,还有Jog持续运动模式,PTP点到点运动模式,PT位置时间模式,可以查看相应手册。此处使用的PVT控制方法是可以通过CAN总线来达到实时性的目
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









