







 本文探讨了状态空间描述和控制理论中传递函数之间的联系。通过拉氏变换,将状态空间表达式转换为传递函数阵,展示了多变量系统中输入与输出之间的耦合关系。举例说明了如何从状态空间模型求解系统的传递函数阵,强调了这种转换在系统分析中的应用。
本文探讨了状态空间描述和控制理论中传递函数之间的联系。通过拉氏变换,将状态空间表达式转换为传递函数阵,展示了多变量系统中输入与输出之间的耦合关系。举例说明了如何从状态空间模型求解系统的传递函数阵,强调了这种转换在系统分析中的应用。
状态空间描述和控制理论传递函数之间存在什么关系呢?
状态空间描述为一种内部描述,为了状态空间对应的输出表达,在此探讨如何从状态空间表达式导出相应的传递函数表达式。
对于最一般形式的状态空间表达式:
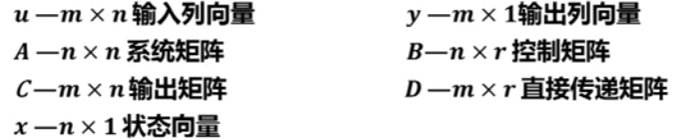
其中:(u应为)
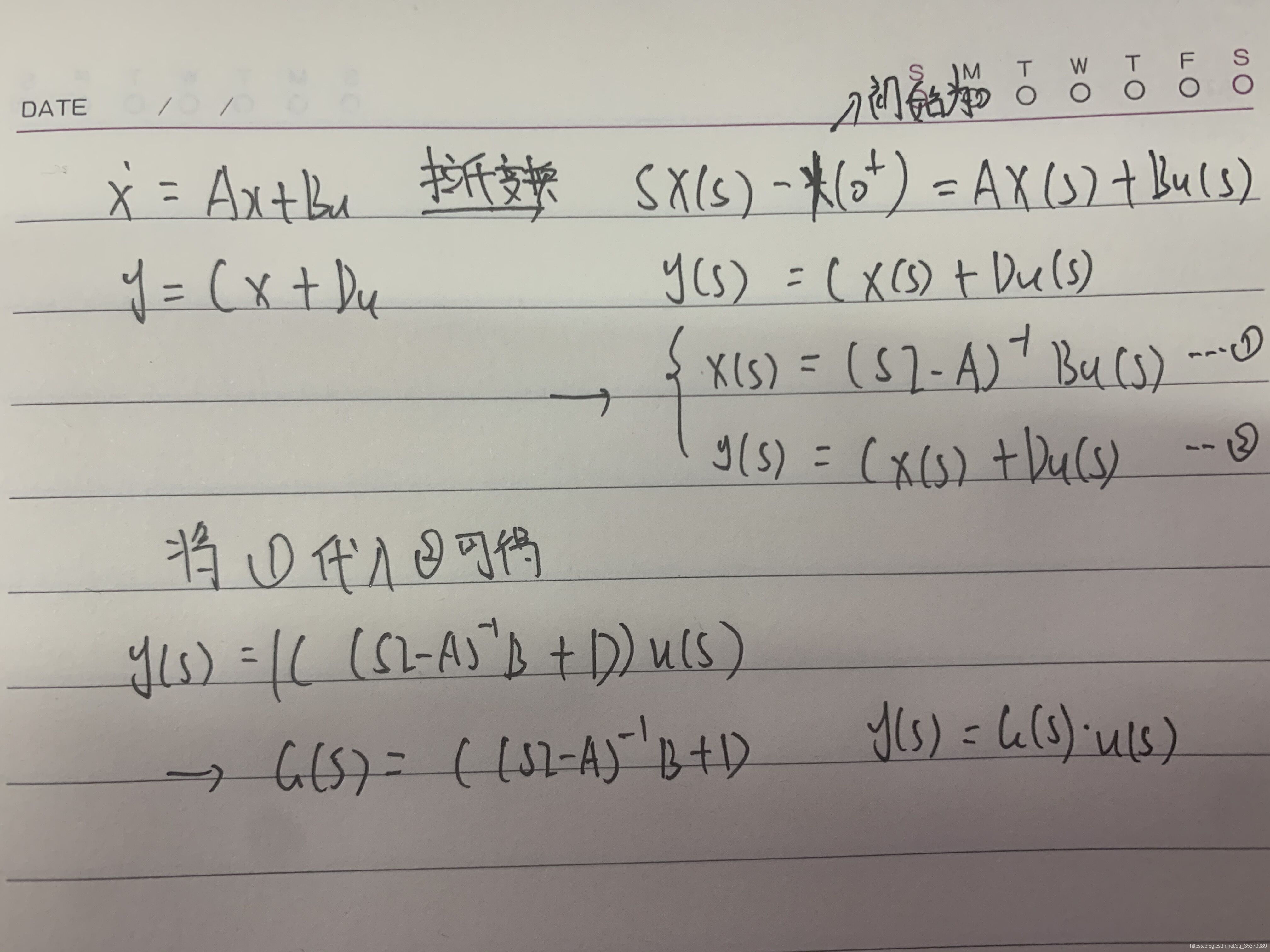
在初始条件为零的前提下,对上式作拉氏变换,得:
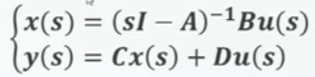
![]()
得到系统的传递函数阵:
![]()
其中,变换过程也非常简单,如下:
系统的传递函数是一个
的矩阵函数,设:
为G(s)的元,则系统的传递函数阵
可表示为以下的形式:
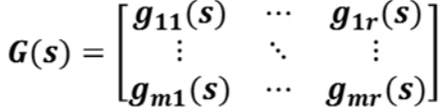
容易看出,其元都是标量函数,它在物理上表示为第j个输入对第i个输出有相互关联。称为耦合关系,这正是多变量系统的特点。
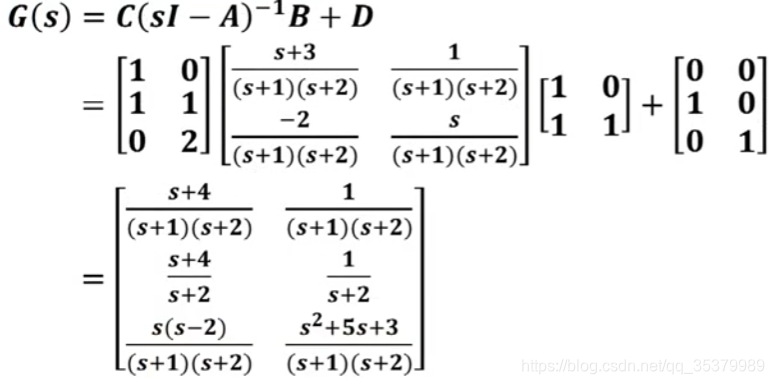
以下考虑一个实例:
对于以下系统,求系统的传递函数阵

解:由已知:
 ,且
,且
 (主对调,副变号)
(主对调,副变号)
所以,系统的传递矩阵为:


















 1524
1524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











