







模型预测控制(MPC)是一类特殊的控制。它的当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得。过程的当前状态作为最优控制问题的初始状态,解得的最优控制序列只实施第一个控制作用。这是它与那些使用预先计算控制律的算法的最大不同。本质上模型预测控制求解一个开环最优控制问题。它的思想与具体的模型无关,但是实现则与模型有关。
基本要素:
1、预测模型:预测模型是指一类能够显式的拟合被控系统的特性的动态模型。
2、滚动优化:滚动优化是指在每个采样周期都基于系统的当前状态及预测模型,按照给定的有限时域目标函数优化过程性能,找出最优控制序列,并将该序列的第一个元素施加给被控对象。
3、反馈校正:反馈校正用于补偿模型预测误差和其他扰动。
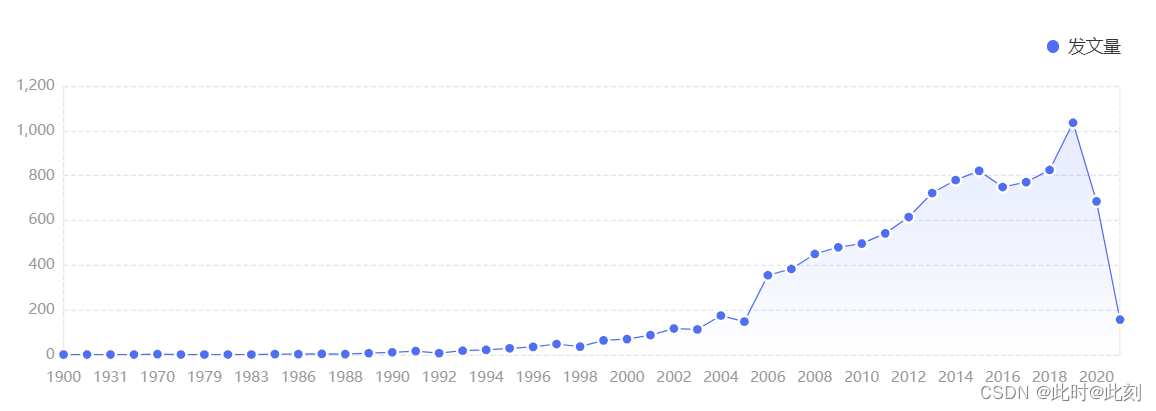
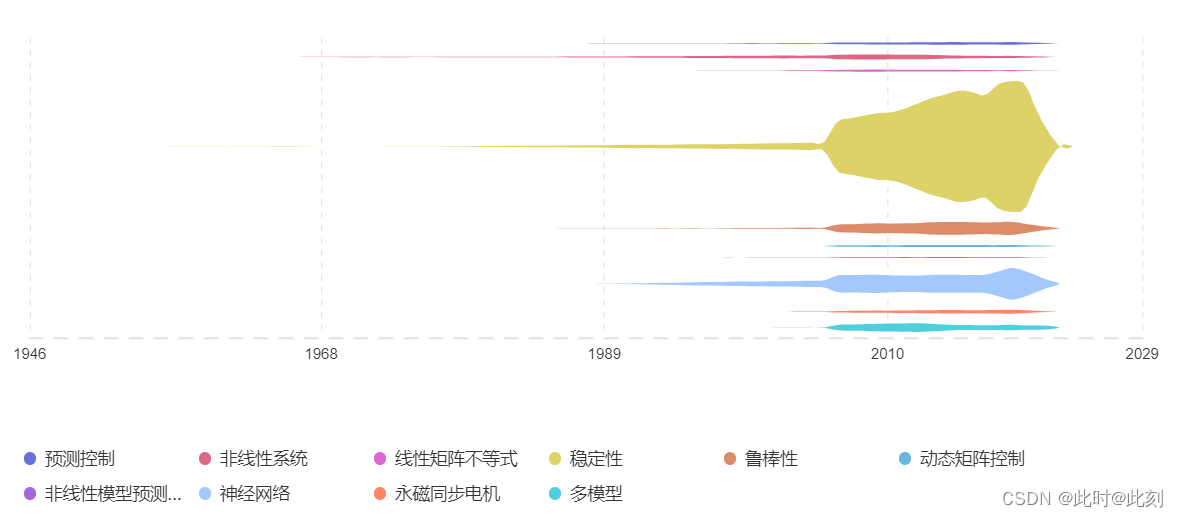
研究趋势:
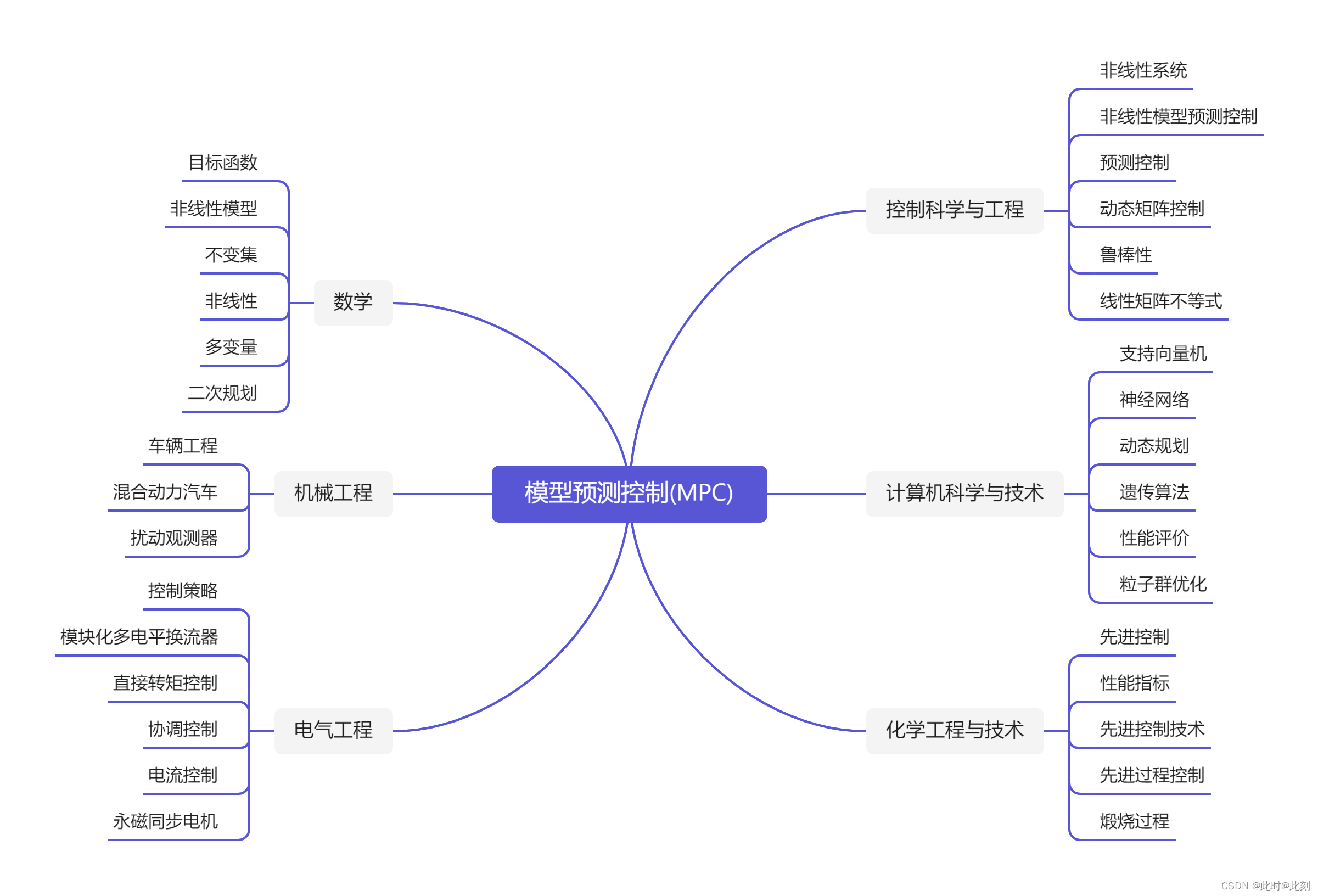
关联研究:
应用领域:
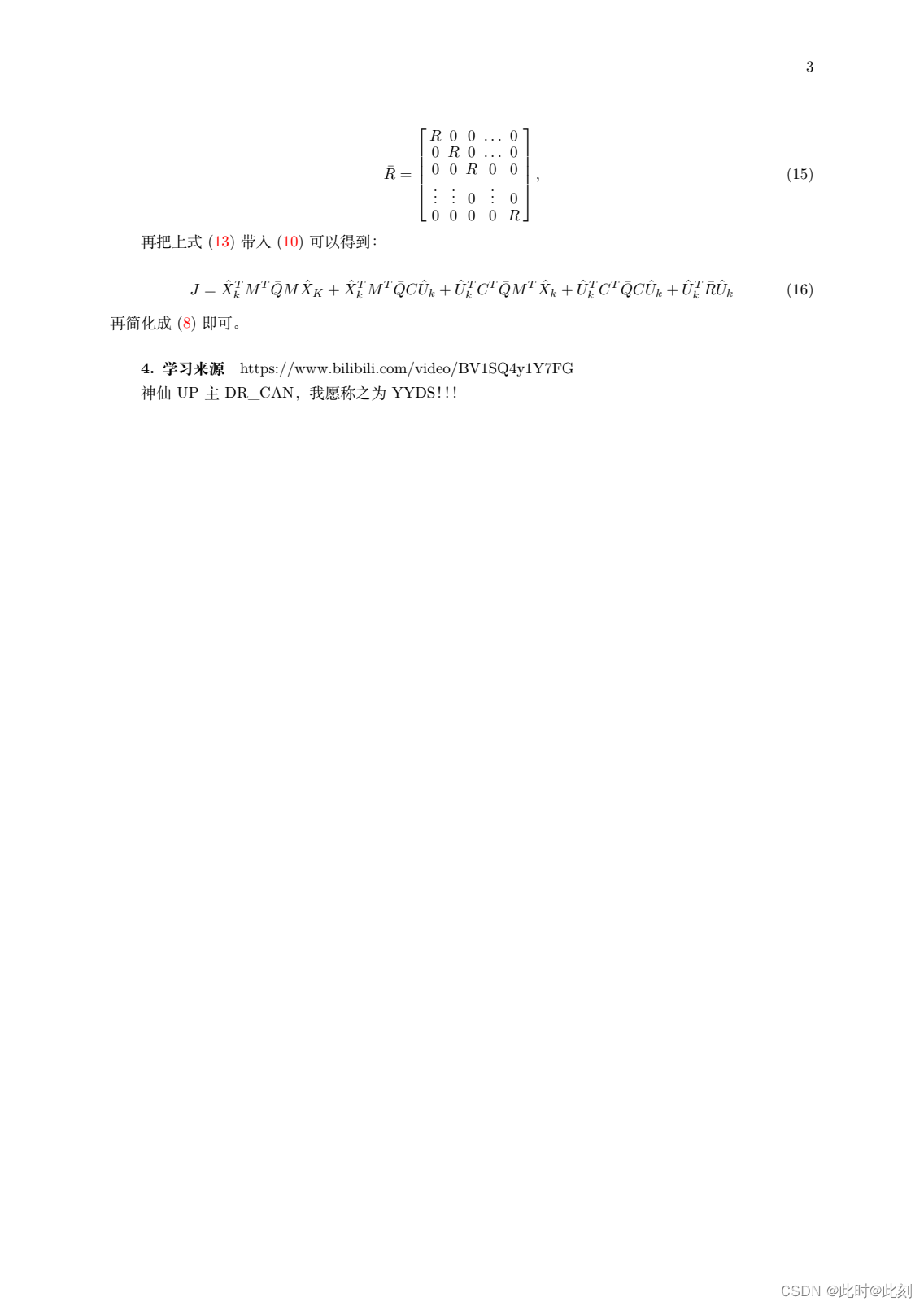
理论推导:




















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











