





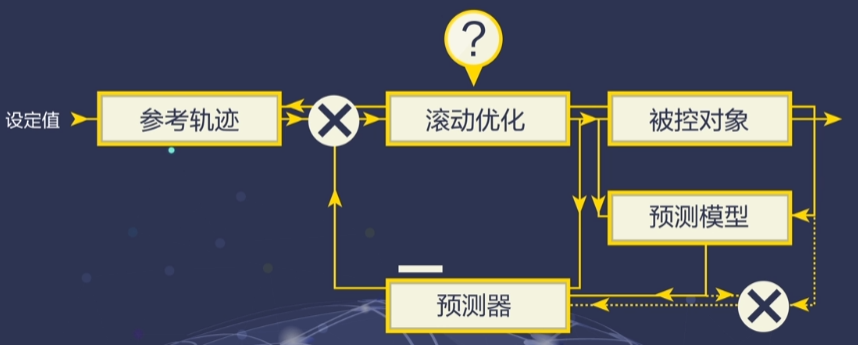
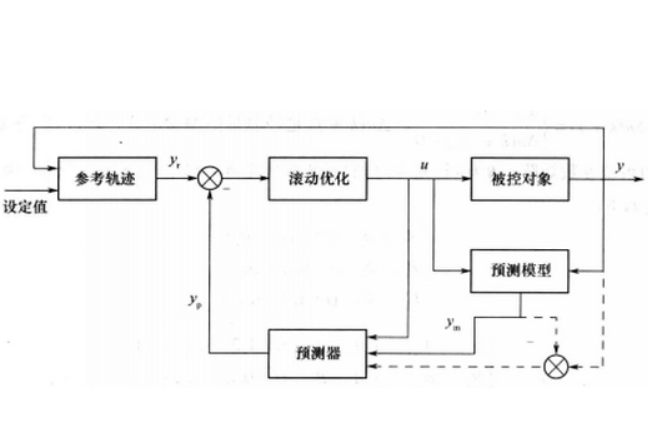
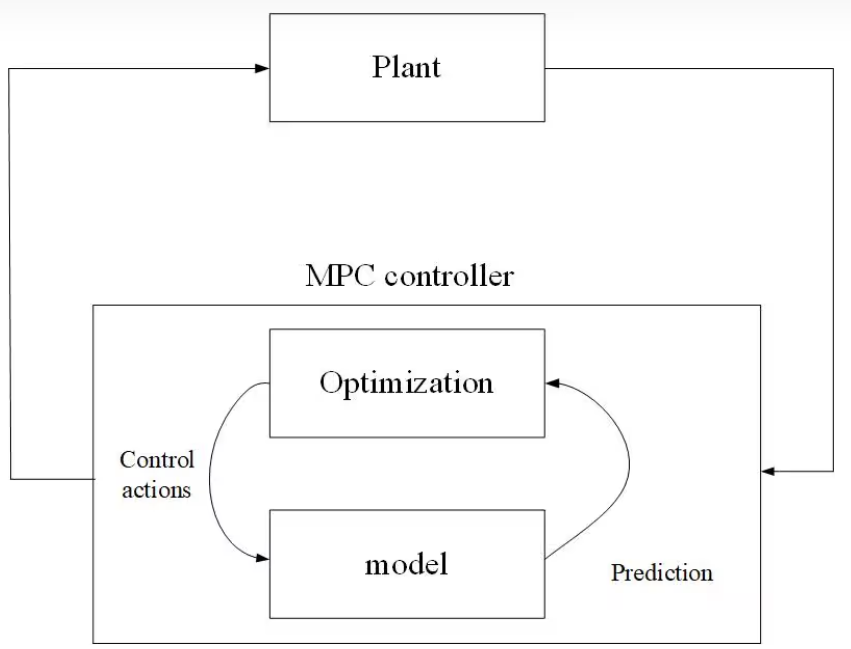
MPC当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得。过程的当前状态作为最优控制问题的初始状态,解得的最优控制序列只实施第一个控制作用。这是它与那些使用预先计算控制律的算法的最大不同。本质上模型预测控制求解一个开环最优控制问题。它的思想与具体的模型无关,但是实现则与模型有关。
(1)预测模型
(2)反馈校正
(3)滚动优化
(4)参考轨迹
参考文献:

MPC当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得。过程的当前状态作为最优控制问题的初始状态,解得的最优控制序列只实施第一个控制作用。这是它与那些使用预先计算控制律的算法的最大不同。本质上模型预测控制求解一个开环最优控制问题。它的思想与具体的模型无关,但是实现则与模型有关。
(1)预测模型
(2)反馈校正
(3)滚动优化
(4)参考轨迹
参考文献:











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




















 8738
8738





