







入门电机系列,基于STM32硬件
本文章学习借鉴于野火团队资料,以表感谢。官网http://products.embedfire.com/
舵机的原理与应用。
前言
有一种电机可以在程序的控制下,在一定范围内连续改变输出轴角度并且可以保持住。这种电机最早被用在航模和船模等遥控模型中,控制各种舵面的转动,这就是舵机。现在舵机除了运用在遥控模型中,也大量的运用在各种机器人、机械臂的关节以及智能小车的转向机构中。下图就是一种标准舵机的外形。

一、舵机的分类
按照舵机的控制电路可以分为:
1、模拟舵机
2、数字舵机
模拟舵机和数字舵机的机械结构可以说是完全相同的,模拟舵机的控制电路为纯模拟电路,需要一直发送目标信号,才能转到指定的位置,响应速度较慢,无反应区较大;数字舵机内部控制电路则加上了微控制器,只需要发送一次目标信号,即可到达指定位置,速度比模拟舵机更快,无反应区也更小。
按照使用对象的不同可以分为:
航模舵机、车模舵机、船模舵机和机器人舵机。
航模舵机一般要求速度快、精度高,而车模和船模用的舵机一般要求具有大扭矩和防水性好。
按照内部机械材质,又可分成:
塑料齿舵机和金属齿舵机。塑料齿舵机内部的传动齿轮是
塑料的,重量轻价格便宜,但是扭矩一般较小无法做大;金属齿舵机的扭矩更大,舵机更
结实耐用,但是相比塑料齿更重也更贵。
按照外部接口和舵机的控制方式,又可分为:
PWM 舵机和串行总线舵机。
舵机的分类根据应用场景的不同可以划分开来。
舵机结构
舵机主要由以下几个部分组成:外壳、舵盘、直流电机、减速齿轮组、角度传感器、控制驱动电路和接口线缆等。常见的舵机内部结构如下图所示。
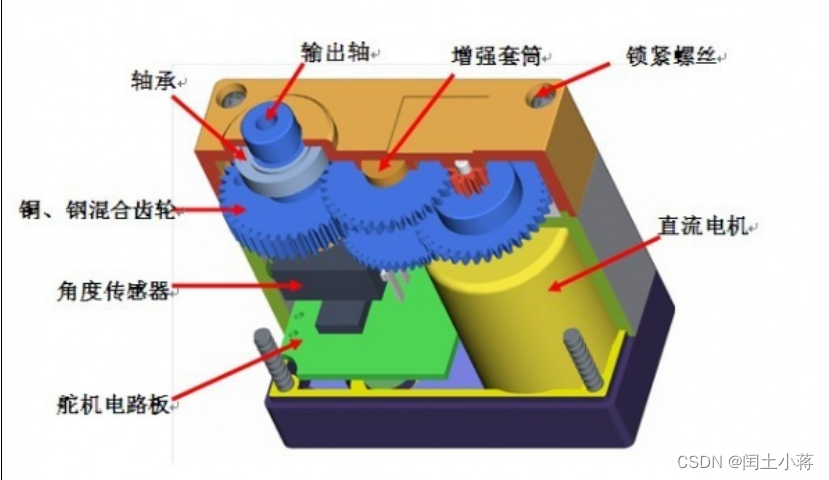
其中角度传感器负责舵机的位置反馈,直接装在舵机的主输出轴上,将轴旋转后产生的角度变化变成电压信号发回控制电路,当前轴角度;控制驱动电路用来接收外部接口传来的信号和角度传感器反馈的电压值,以及驱动直流电机旋转;减速齿轮组则是降低直流电机的转速并且放大扭矩。
舵机工作原理
模拟舵机和数字舵机内部电路不同,所以原理上稍有差别,这里以模拟舵机进行讲解。模拟舵机内部的控制驱动电路板从外界接收控制信号,经过处理后变为一个直流偏置电压,在控制板内部有一个基准电压,这个基准电压由电位器产生并反馈到控制板。将外部获得的直流偏置电压与电位器的电压进行比较获得电压差,并输出到电机驱动芯片驱动电机,电压差的正负决定电机的正反转,大小决定旋转的角度,电压差为 0 时,电机停止转动。大致原理框图如下图所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3968
3968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











