






一、什么是舵机
舵机是一种根据位置角度转动的电机,说白了舵机只支持在一定角度的转动,无法像直流电机一样按圈转;
二、舵机的种类
1,模拟舵机
最出名也是我们入门学习PWM波的时候的SG90。
| SG90的优点与缺点 | |
|---|---|
| 优点 | 便宜,小巧 |
| 缺点 | 扭矩太小,不足达到控制效果,所以一般只能做到入门 |

除了SG90之外,还有MG995,MG996R,MG90S等。
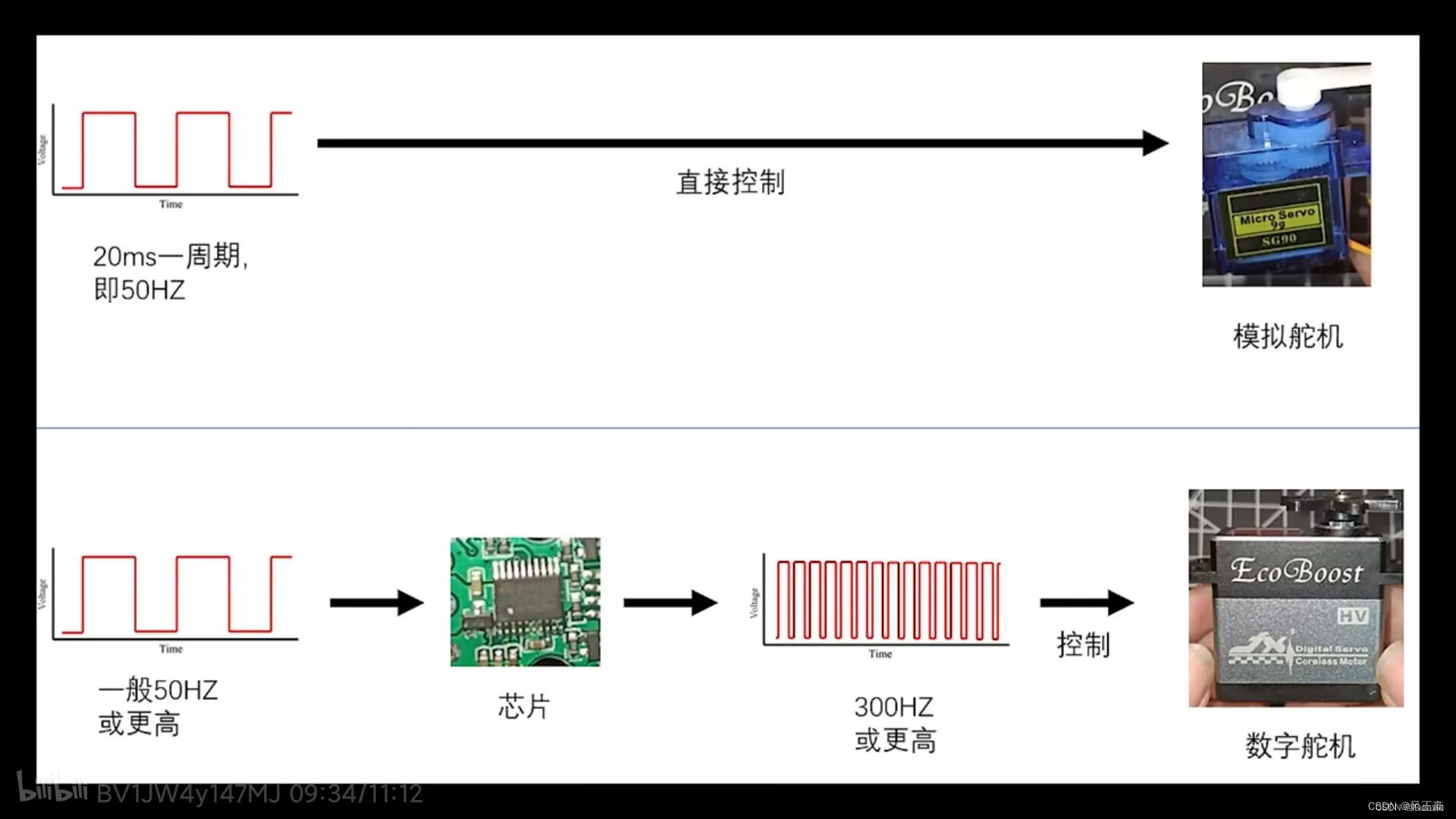
2,数字舵机
- 它是模拟电机的升级版
- 数字舵机里装载的一个微控制器,可以达到更快的响应频率。比如:单片机发送一段50HZ的方波给数字舵机,数字舵机里面的微控制器对传输过来的50HZ进行放大处理,这样拥有较高的精度和非常快的响应速度。如下图。
- 数字舵机的死区比较小 。(舵机的死区指在控制信号的一个范围内,舵机不会产生任何响应,打个比方:我们刹车时,要踩刹车制动踏板,但是我们轻踩是汽车是不会立刻刹车,只能减速滑行。只有踏板踩到一定深度才能刹车。死区较小意味着精度高,在控制信号范围内,可以即时响应)
| 数字舵机 | 模拟舵机 | |
|---|---|---|
| 优点 | 精度高(0.1°左右),死区小,动力稳定,一次PWM波控制,以保持角度,响应速度快(3.3ms) | 便宜,小巧,耗电低 |
| 缺点 | 贵,耗电高 | 精度比较低(1°左右),响应速度慢(20ms),不断PWM波控制,以保持角度 |
三、舵机的组成
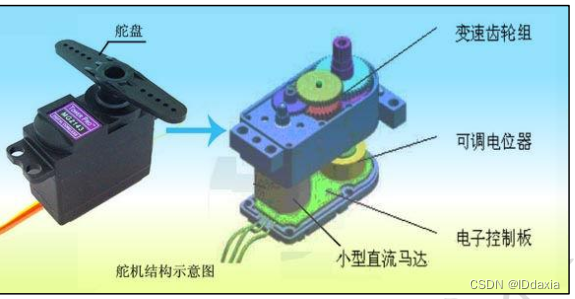

舵机有塑料/金属外壳、舵盘、直流电机、减速齿轮组、位置反馈器、控制电路等;

实物连接线
- 黄色线-----------信号线
- 红色线-----------电源正极+
- 棕色线-----------电源负极-
四、舵机工作原理

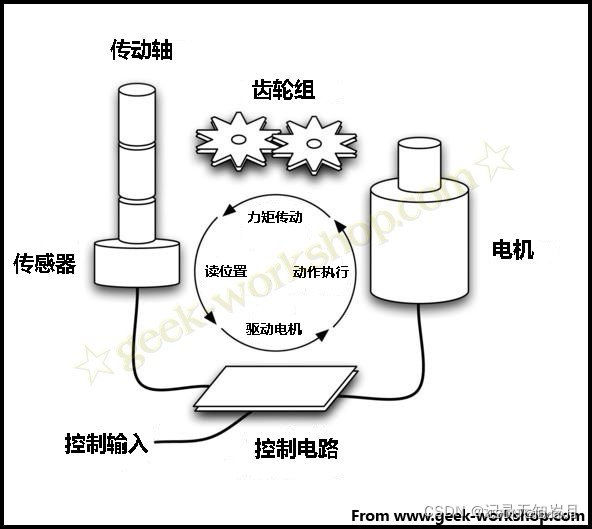
- 舵机接收到单片机的PWM波
- 控制电路收到PWM信号,经处理后输出一个直流偏置电压Vin
- 由于舵机的电子控制板会产生周期为20ms、脉宽为1.5ms的基准信号,也就是基准电压Vref
- 通过电压比较器将基准电压Vref与直流偏置电压Vin进行比较,输出电压差
- 通过电压差的输出到驱动芯片驱动电压,电压差的正负决定电机正反转,压差的大小决定旋转角度,电压差为0,电机停止转动。
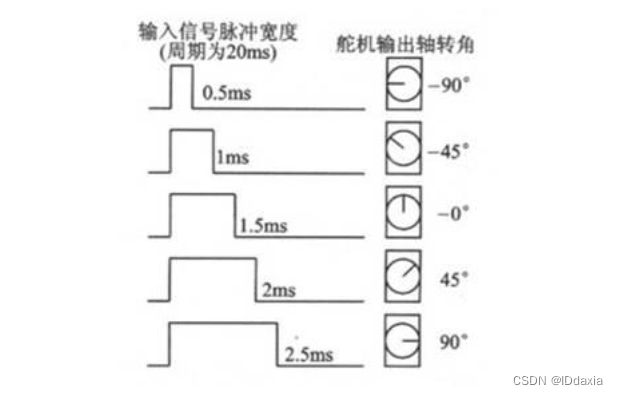
| 脉冲宽度 | 0.5ms | 1ms | 1.5ms | 2ms | 2.5ms |
|---|---|---|---|---|---|
| 转动角度 | -90° | -45° | 0° | 45° | 90° |

















 3477
3477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









