






文章目录
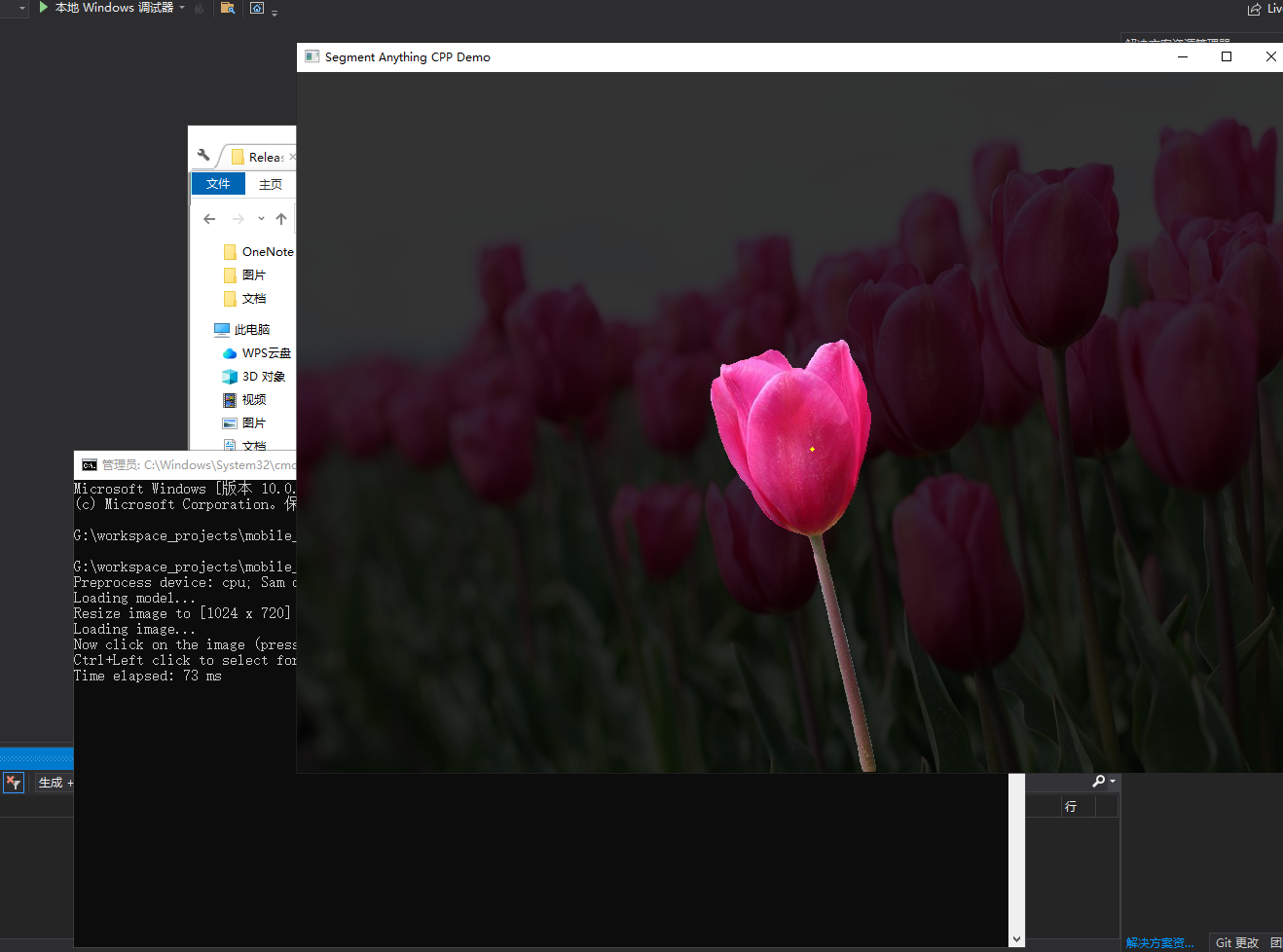
1. cpu结果图
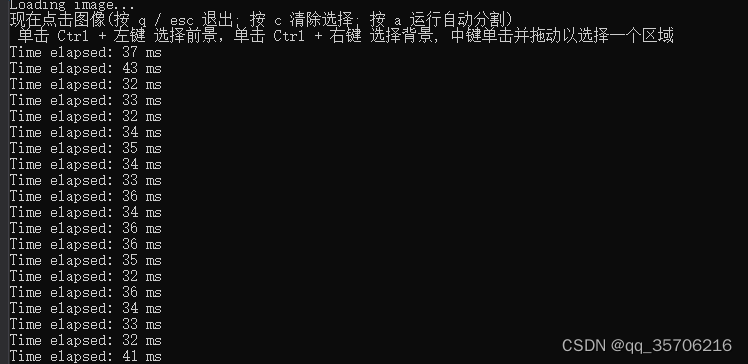
1.1. onnx
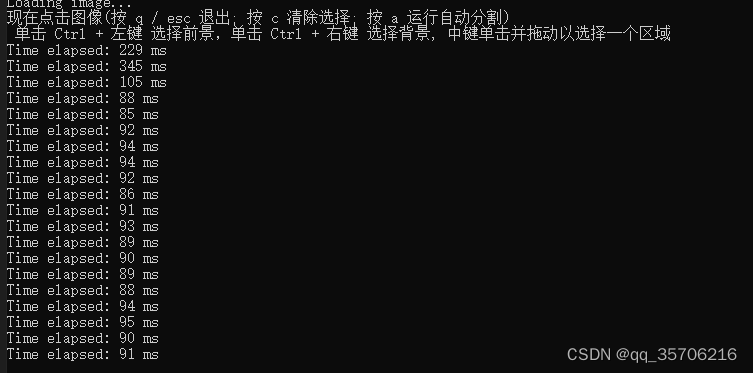
1.2. libtorch
2. 使用工具版本
- 系统:Windows10
- visual studio 2019
- CMake 3.28.1
- opencv 4.9
- onnxruntime 1.14.1
- libtorch 1.8.1
3. 安装
3.1 安装cmake
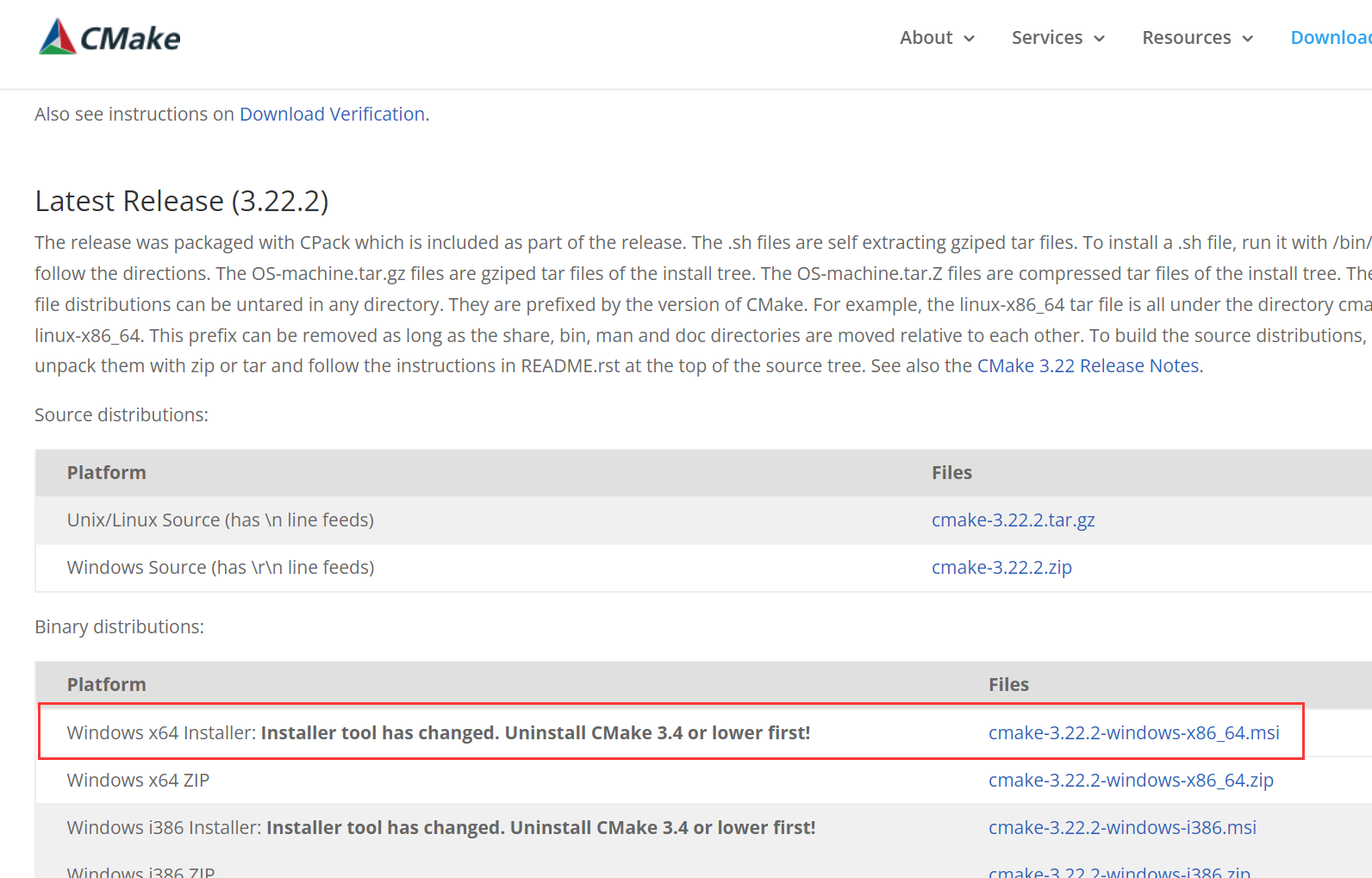
CMake下载链接:https://cmake.org/download/。
3.1.1 下载最新稳定版即可(Latest Release):
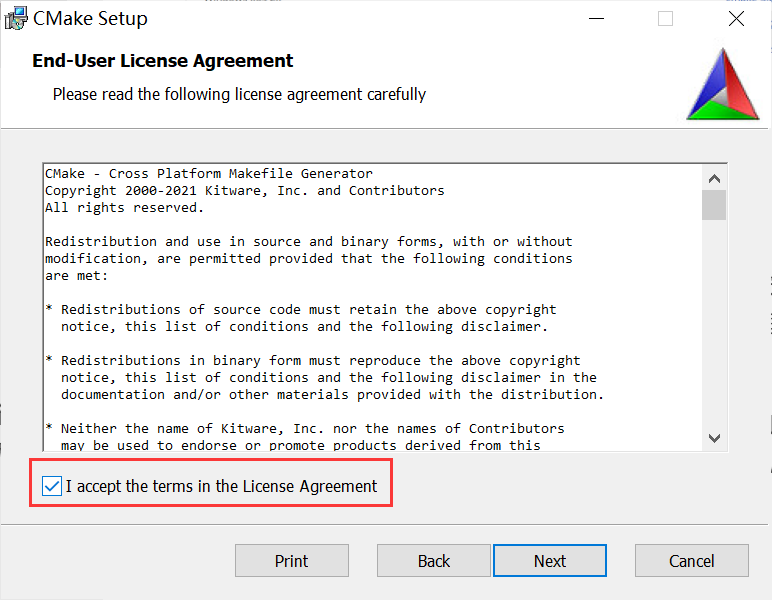
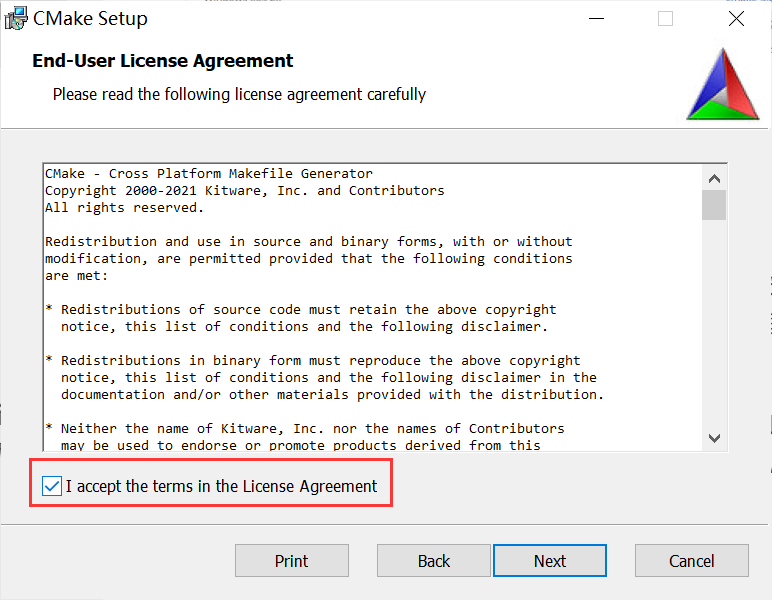
3.1.2 下载完成后,单击“Next”按钮,在下图中勾选“I accept the terms in the License Agreement”复选框接受许可协议:
3.1.3 选中“Add CMake to the system PATH for all users”单选按钮添加系统路径变量。也可以同时勾选“CreateCMakeDesktopIcon”复选框,以便在安装完成后在桌面上创建CMake的快捷方式图标。
点击Install进行安装。
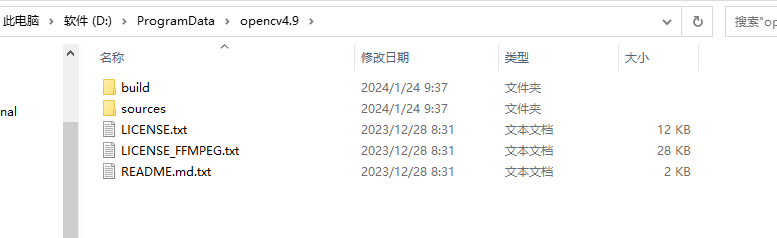
3.2 安装opencv
地址:https://github.com/opencv/opencv/releases/download/4.9.0/opencv-4.9.0-windows.exe
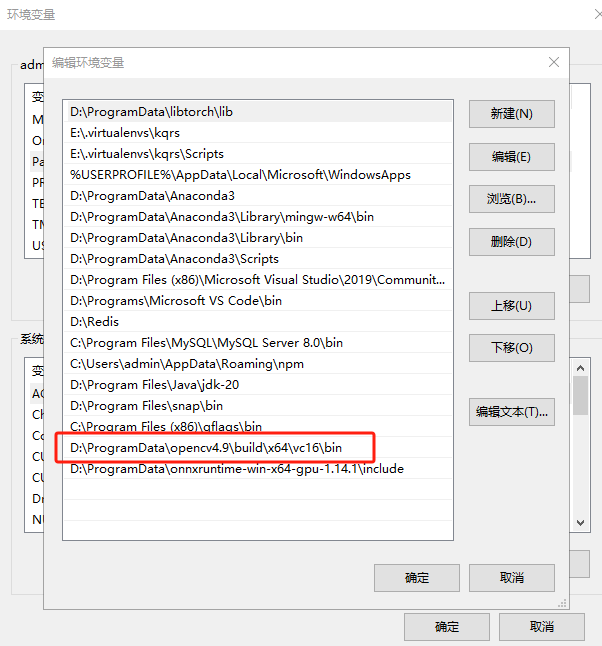
3.2.1 安装到指定目录并添加系统环境变量
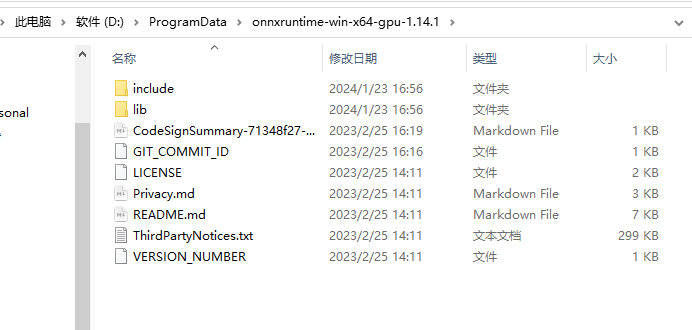
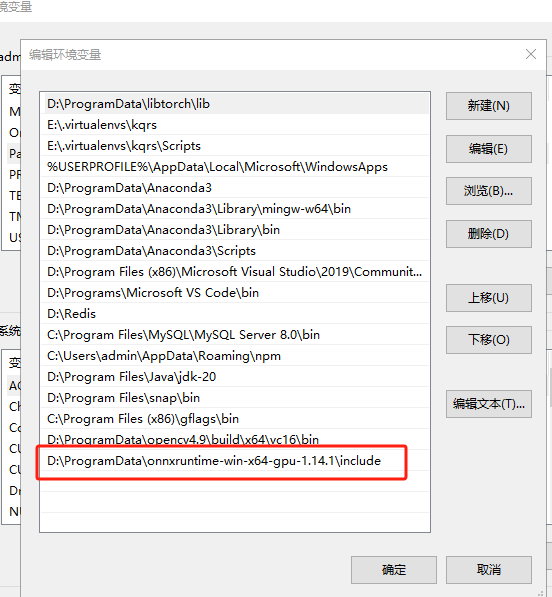
3.3 安装onnxruntime
3.3.1 解压到指定目录并添加系统环境变量
3.4 安装gflags
地址:https://github.com/gflags/gflags
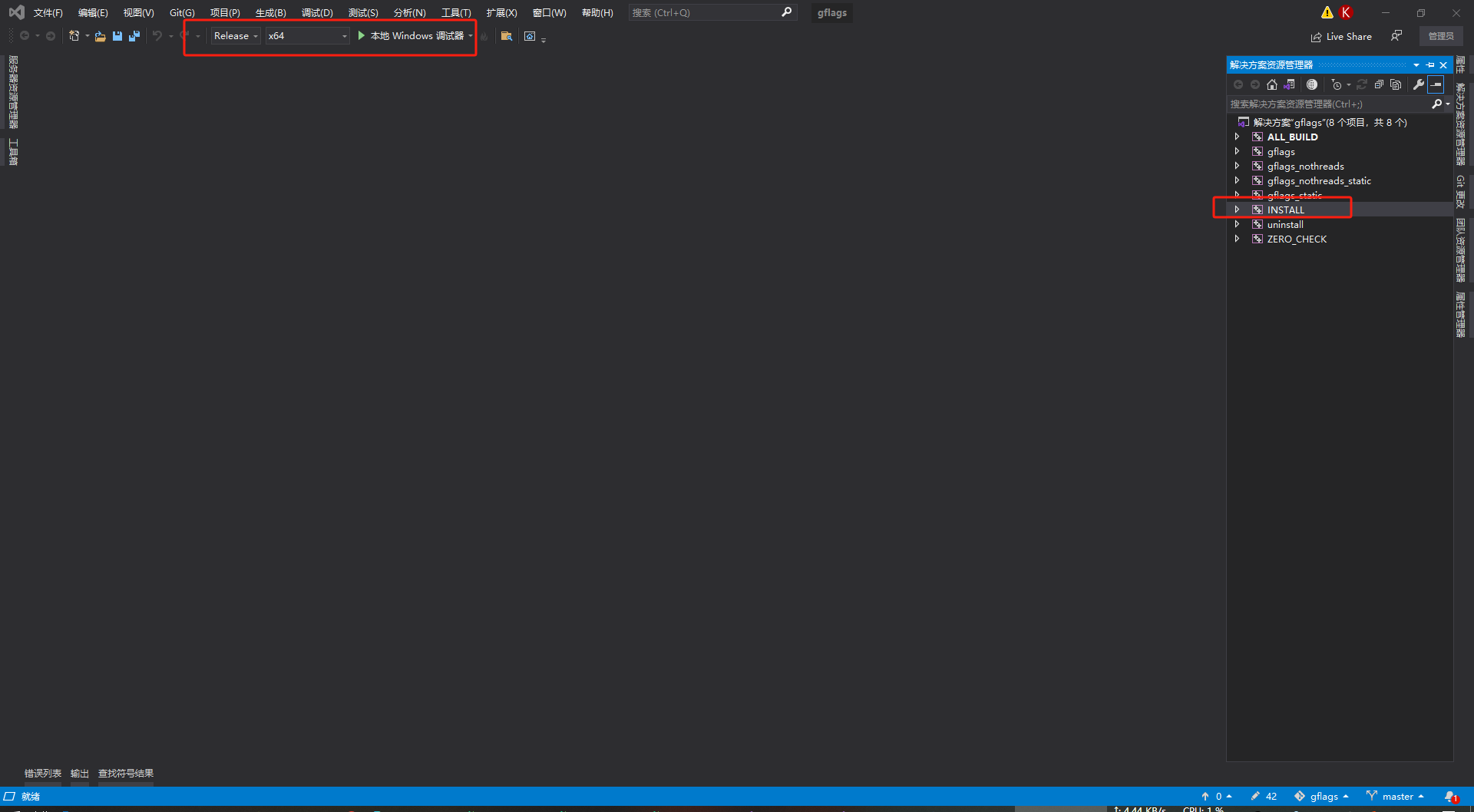
3.4.1 下载以后用cmake编译

3.4.2 点进Open Project,选择Release,右边解决方案INSTALL右键,生成
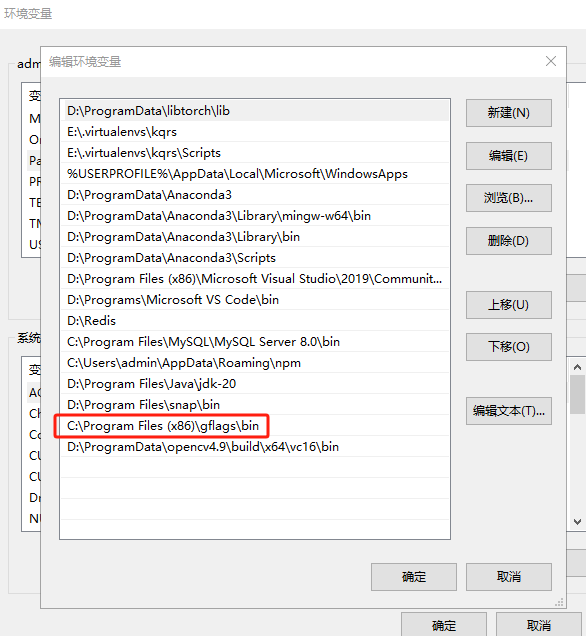
3.4.3 加入系统环境变量
3.5 安装libtorch
地址:https://download.pytorch.org/libtorch/cu111/libtorch-win-shared-with-deps-1.8.1%2Bcu111.zip
3.5.1 解压到指定目录并添加系统环境变量
4. 基于onnxruntime部署编译
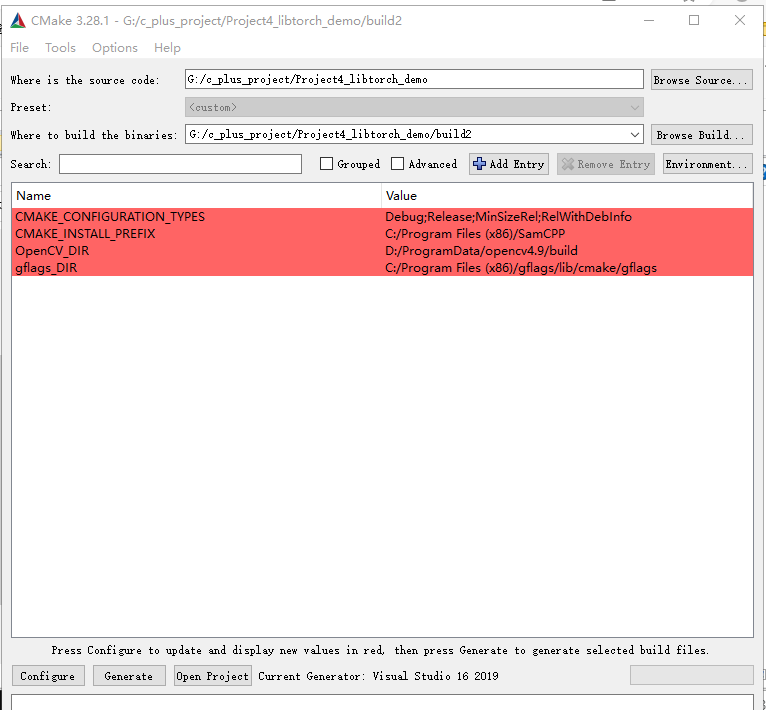
4.1 新建build文件夹,用来存放项目编译结果,并用cmake打开预编译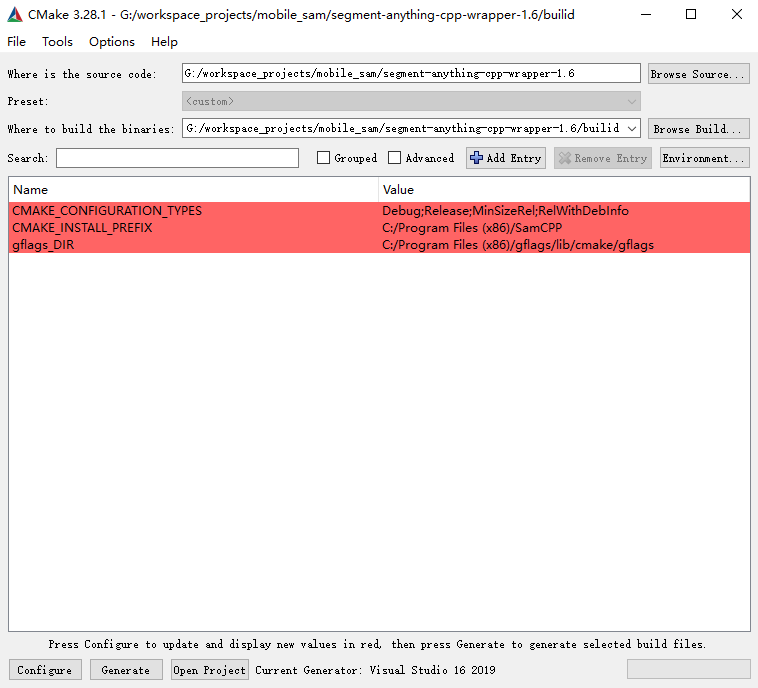
4.2 vs打开编写属性页
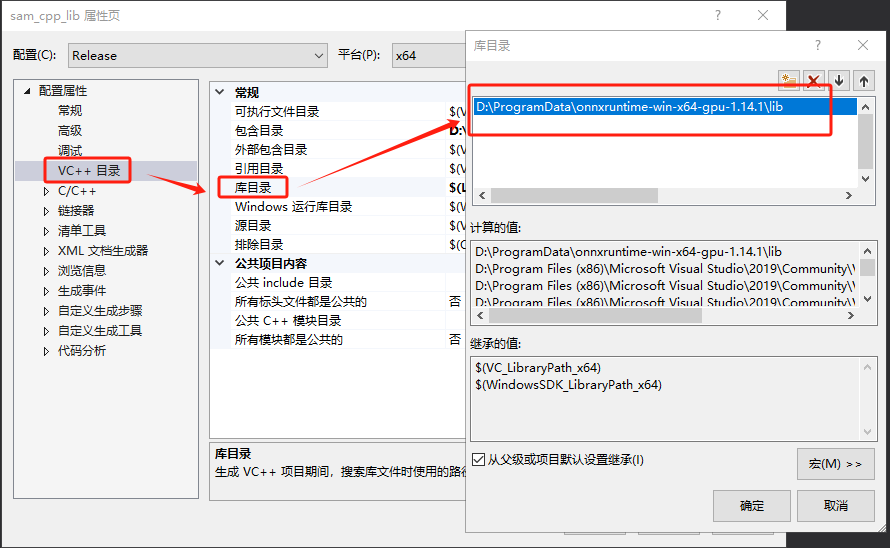
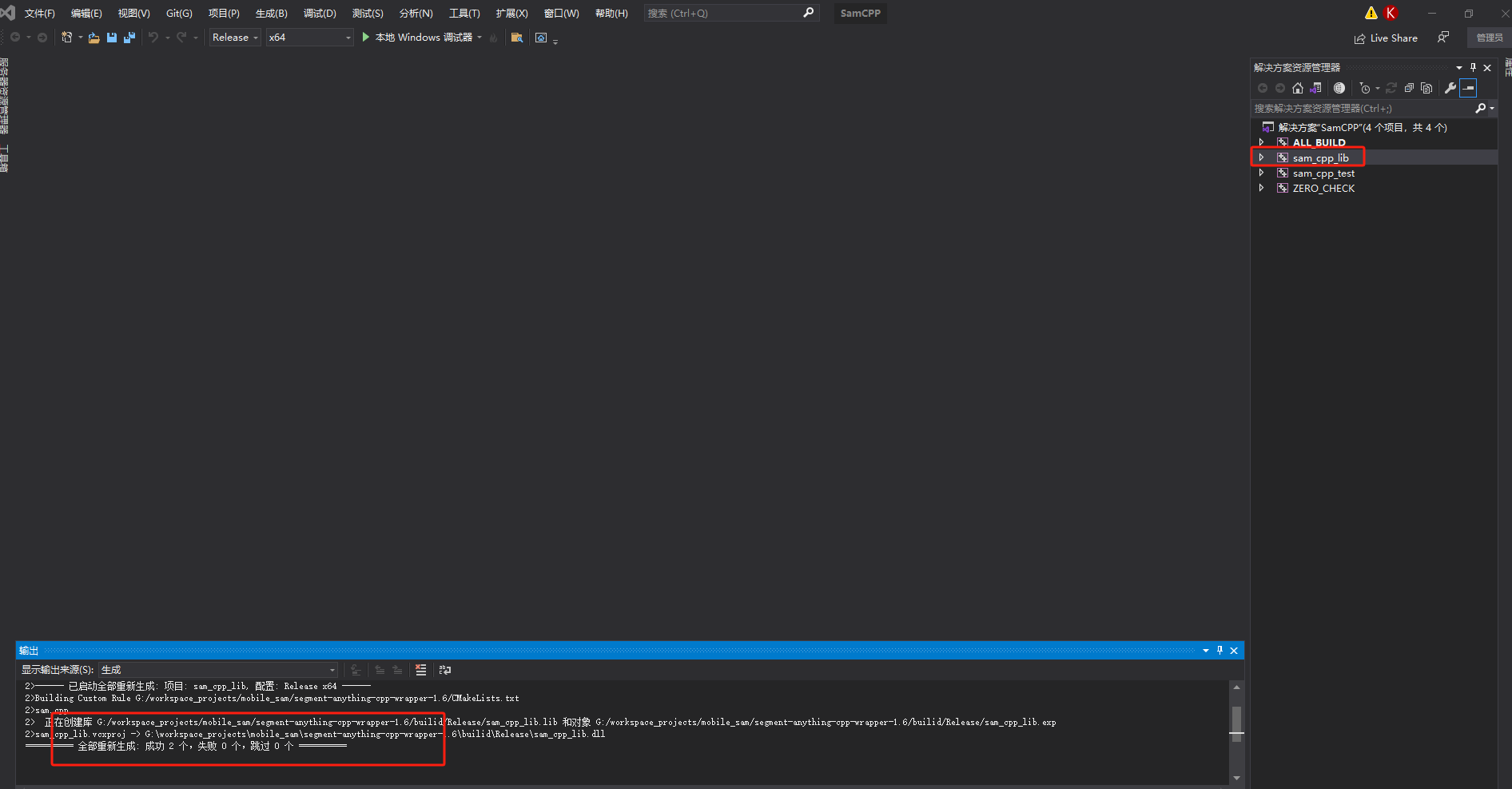
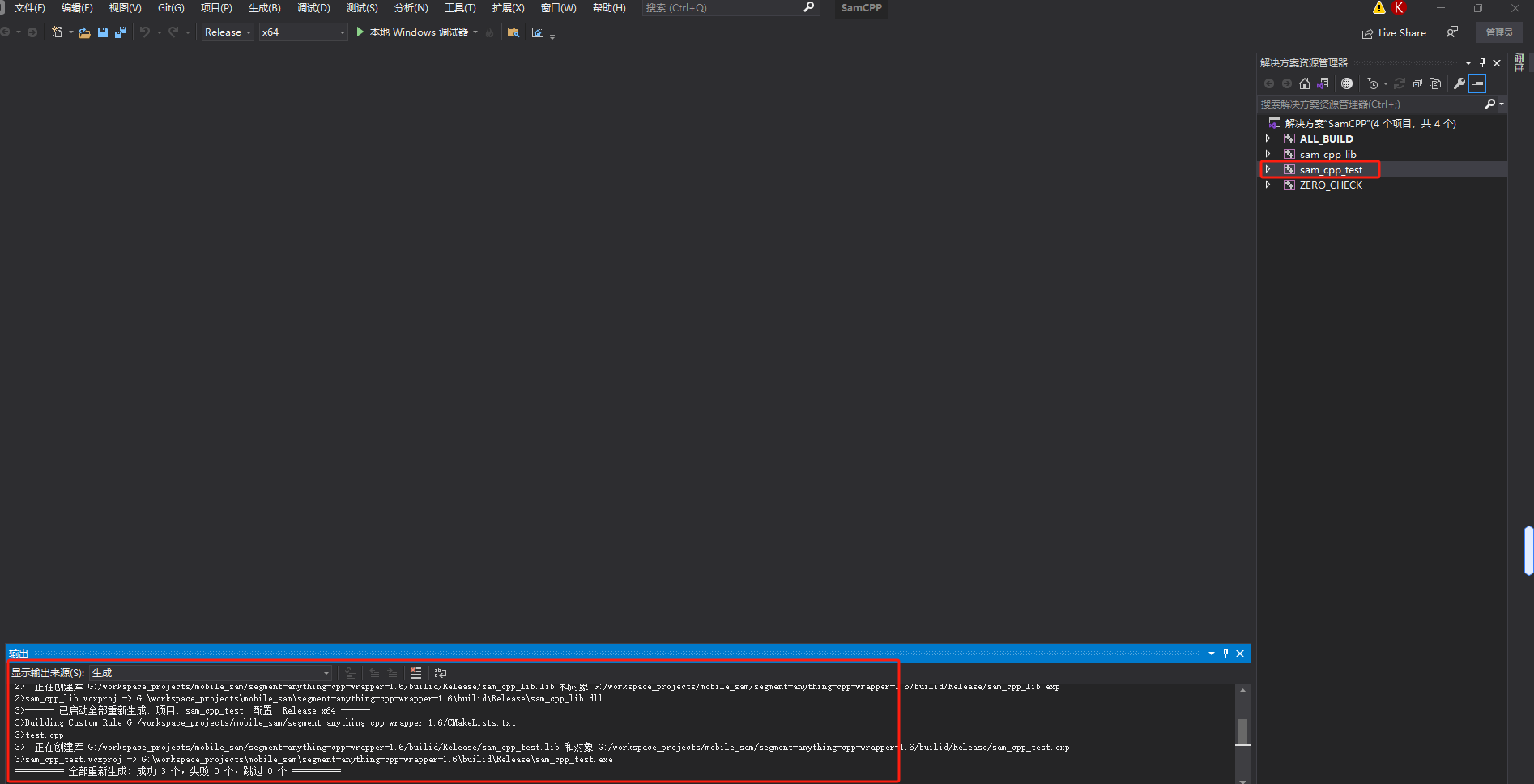
4.3 编译
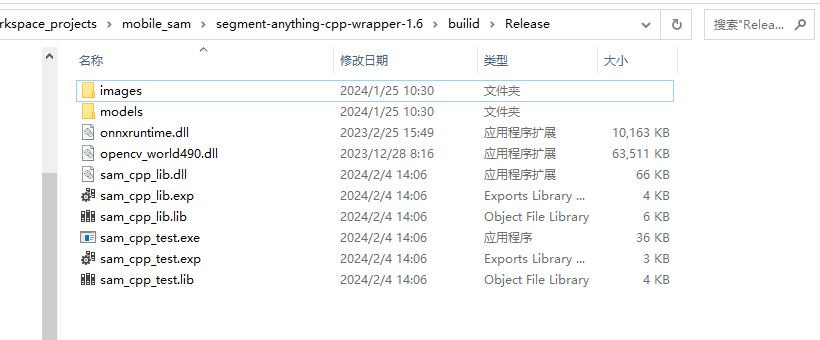
4.4 运行exe文件验证
5. 基于libtorch部署编译
5.1 cmake预编译
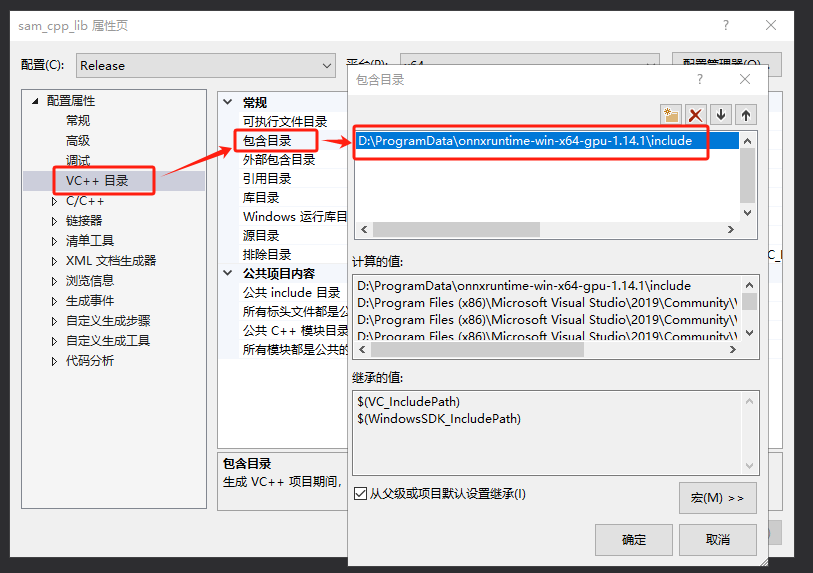
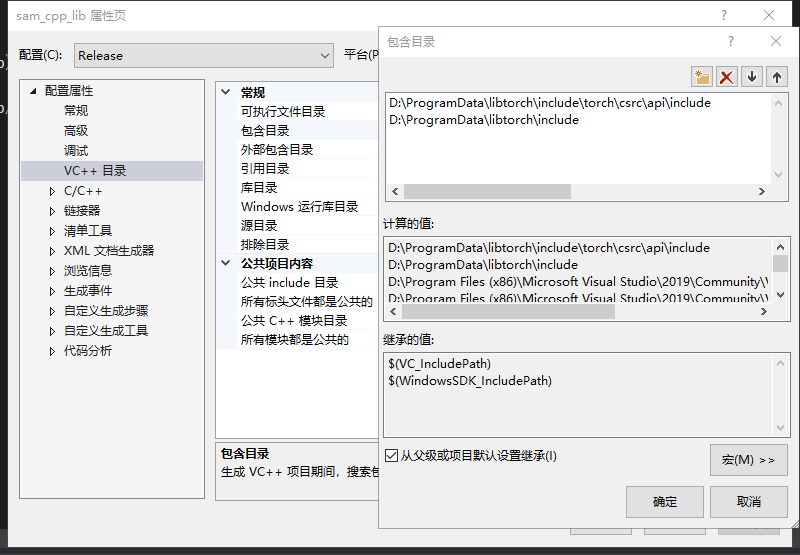
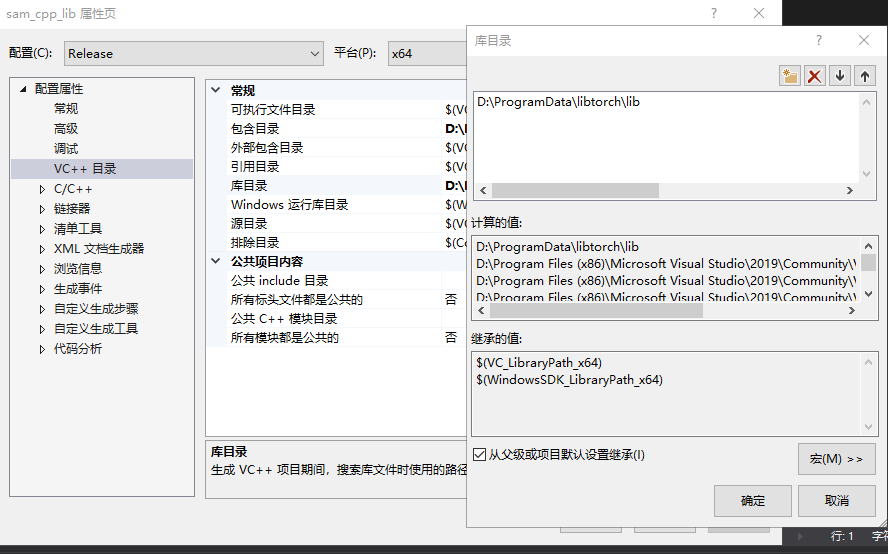
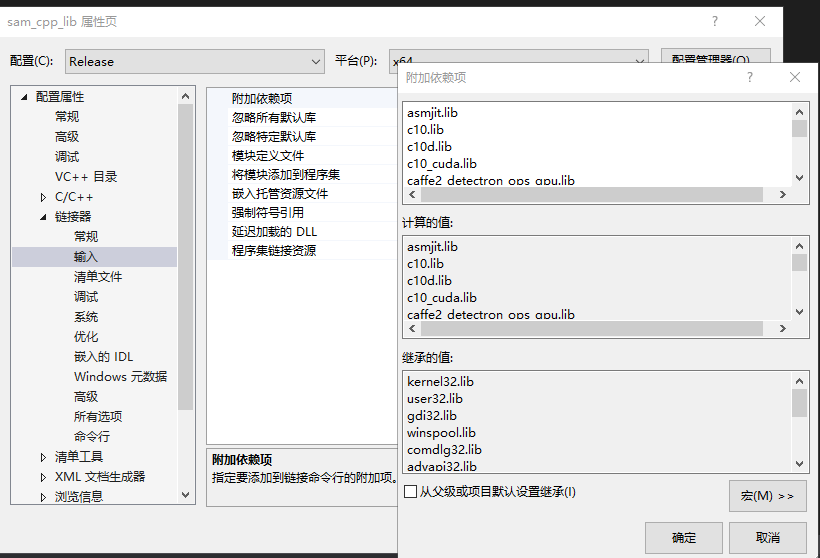
5.2 vs打开编写属性页
asmjit.lib
c10.lib
c10d.lib
c10_cuda.lib
caffe2_detectron_ops_gpu.lib
caffe2_module_test_dynamic.lib
caffe2_nvrtc.lib
clog.lib
cpuinfo.lib
dnnl.lib
fbgemm.lib
fbjni.lib
gloo.lib
gloo_cuda.lib
libprotobuf-lite.lib
libprotobuf.lib
libprotoc.lib
mkldnn.lib
pthreadpool.lib
pytorch_jni.lib
torch.lib
torch_cpu.lib
torch_cuda.lib
torch_cuda_cpp.lib
torch_cuda_cu.lib
XNNPACK.lib
5.3 编译运行


















 2128
2128

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









