







目录
1. 机械特性表达式
转速与转矩的关系
① 物理表达式
T e = C T 1 Φ m I 2 ′ c o s φ 2 ′ T_e = C_{T1}\Phi_mI_2'cos\varphi_2' Te=CT1ΦmI2′cosφ2′
② 参数表达式
T e = m 1 Ω U ϕ 2 R 2 ′ s ( R 1 + R 2 ′ s ) 2 + ( X 1 + X 2 ′ ) 2 T_e = \frac{m_1}{\Omega}\frac{U_\phi^2\frac{R_2'}{s}}{(R_1 + \frac{R_2'}{s})^2 + (X_1 + X_2')^2} Te=Ωm1(R1+sR2′)2+(X1+X2′)2Uϕ2sR2′
③ 实用表达式
T e = 2 T m a x s s m + s m s T_e = \frac{2T_{max}}{\frac{s}{s_m} + \frac{s_m}{s}} Te=sms+ssm2Tmax
2. 固有机械特性
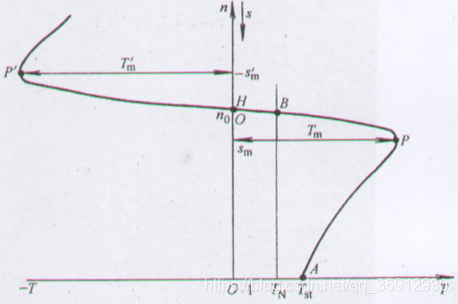
A 点 A点 A点:启动点
P 点 P点 P点:最大转矩点
B 点 B点 B点:额定工作点
H 点 H点 H点:同步转速点
P ′ 点 P'点 P′点:回馈制动最大转矩点
3. 人为机械特性
(1) 降低 U ϕ U_\phi Uϕ

特点:
- 同步转速不变
- 最大转矩降低
- 临界转差率不变
- 启动转矩降低
(2) 转子电路内串联对称电阻
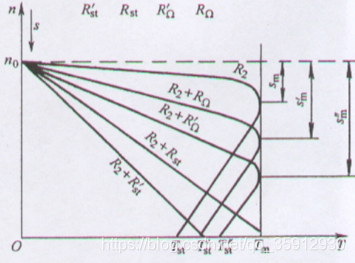
特点:
- 同步转速不变
- 最大转矩不变
- 临界转差率增大
- 起动转矩随外串电阻的增大而增大;当电阻达到一定数值后,继续增大外串电阻,启动转矩减小。
(3) 定子电路串联对称电抗
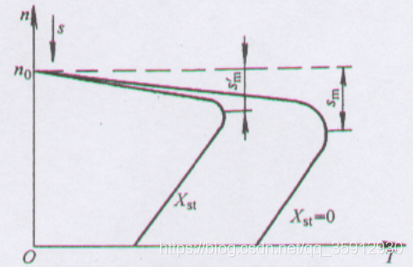
特点:
- 同步转速不变
- 最大转矩降低
- 临界转差率减小
- 起动转矩降低
(4) 定子电路串联对称电阻
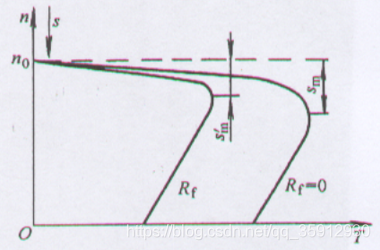
特点:
- 同步转速不变
- 最大转矩降低
- 临界转差率减小
- 启动转矩降低

















 3435
3435

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









