







 本文详细介绍了FMCW雷达的基本原理,包括其使用频率调制连续波进行目标探测的方式。通过分析发射和反射信号的频率变化,可以计算目标的距离和速度。此外,还探讨了雷达的信号实现过程,以及如何通过距离和角度测量来确定目标的位置。文章还涉及到了距离和角度分辨率的计算方法。
本文详细介绍了FMCW雷达的基本原理,包括其使用频率调制连续波进行目标探测的方式。通过分析发射和反射信号的频率变化,可以计算目标的距离和速度。此外,还探讨了雷达的信号实现过程,以及如何通过距离和角度测量来确定目标的位置。文章还涉及到了距离和角度分辨率的计算方法。
一.雷达基本原理
FMCW雷达(Frequency Modulated Continuous Wave Radar)是一种使用频率调制连续波的雷达系统。它使用一个发射器发射一个连续波,但是这个连续波的频率会在一定的范围内不断变化。当这个连续波遇到一个目标物体并被反射回来时,接收器会检测到这个反射波的频率变化,并计算出目标物体的距离和速度等信息。
FMCW雷达的原理可以理解为:
1.发射器发射一个连续波,这个波的频率会从一个固定的起始频率开始,逐渐变化至一个固定的终止频率。
2.这个连续波遇到一个目标,被反射回来形成一个反射波。由于目标物体的距离和速度不同,这个反射波的频率也会发生变化。
3.接收器接收到反射波,并通过分析反射波的频率变化,可以计算出目标物体的距离和速度等信息。
二.雷达信号的实现
[提示]大家将下列推导过程自己推一遍,印象会更加深刻
假设有一调频信号:
其中,为信号初始频率;
为时间;
为调频率,它代表信号在整个调频带宽上的频率变化速率,公式为:
其中,为带宽;
为单次信号周期。
对信号积分,可得对应瞬时相位:
其中,为初相位。
得到发射信号:
其中,为发射脉冲幅值。
当发射信号在空中延时之后,回波信号为:
其中,为回波信号相比于发射信号的增益倍数,它和接收通信尺寸、增益有关,可以认为是一种已知的固定属性值。
此时回波瞬时相位为:
利用发射信号相位减去接收信号相位可得差频信号相位:
对中对
求导,可得差频频率:
最终差频信号为:
三.距离测量
通常情况下,我们将目标认为是静止的,即可以令
其中,为雷达与目标之间的距离;
为光速。
将代入
公式中,可得距离公式:
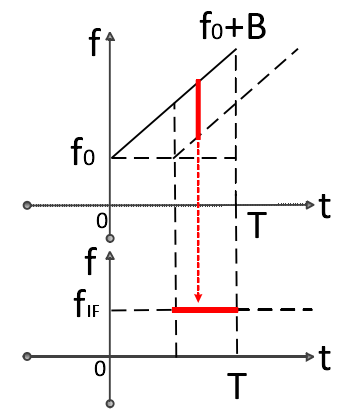
因此,由表达式可得,当已知目标差频频率,就可算出相应距离,差频信号的获取如下图所示:
根据距离公式,可以对系统的距离分辨率以及最大测量距离进行计算,频率分辨率(采样分辨率)为:
其中,为采样率;
为采样点数;
为采样周期。对应距离分辨率为:
最大测量距离则为代入最大采样频率条件下的距离值:
四.角度测量
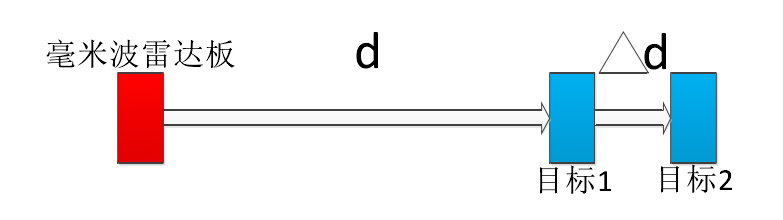
角度测量需至少两个天线才能完成,原理是利用同时刻空间位置接收到不同信号的瞬时相位来计算。微小的距离变化将会带来明显的相位差异。假设有两个目标,如下图所示:
可以根据微小距离差推出相位差,公式为:
根据阵列天线几何图形求解角度:
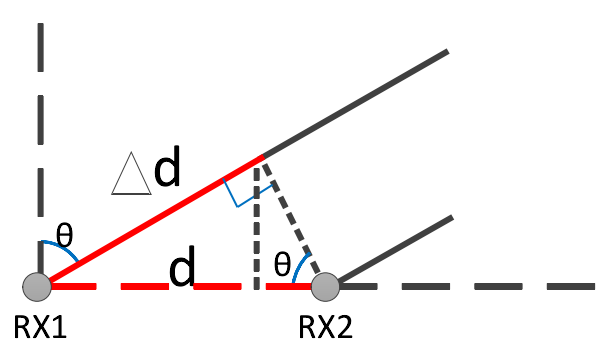
图中, ,
为接收天线间距,将
代入
中,可以求出角度
:
角度分辨率是分辨两个目标的重要指标,假设两个目标相距相位为,根据两天线位置关系可得相位差:
根据数学公式,计算出上述式子中括号里的值:
因此,相位差公式为:
---------------------------------------------------------------------------------------------------------------------------------
参考文献:
[1]申朝维.基于毫米波雷达的物位测量系统[D].北京工业大学,2021.
如有侵权请联系删除
-------------------------------------------------------我的其他代码--------------------------------------------------------


















 8146
8146

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











