









单频连续波雷达仅可用于测速,无法测距,FMCW即连续调频技术,最早是1950年用于雷达测距;FMCW雷达既可测距又可测速,并且在近距离测量上的优势日益明显。
优点:FMCW雷达收发同时,理论上不存在脉冲雷达所存在的测距盲区,并且发射信号的平均功率等于峰值功率,因此只需要小功率的器件,从而降低了被截获干扰的概率。FMCW雷达具有容易实现、结构相对简单、尺寸小、重量轻以及成本低等优点,在民用/军事领域均得到了广泛的应用。
缺点:是测距量程较短,距离多普勒耦合以及收发隔离难。
那么什么是连续调频技术?
目录
FMCW激光雷达原理:
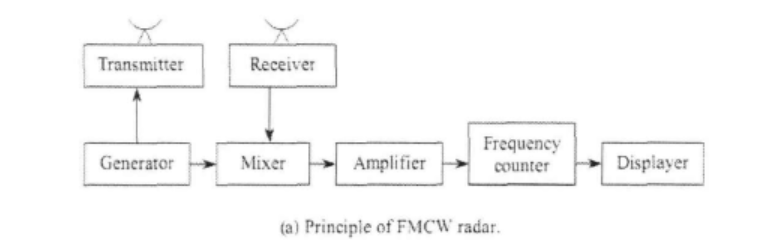
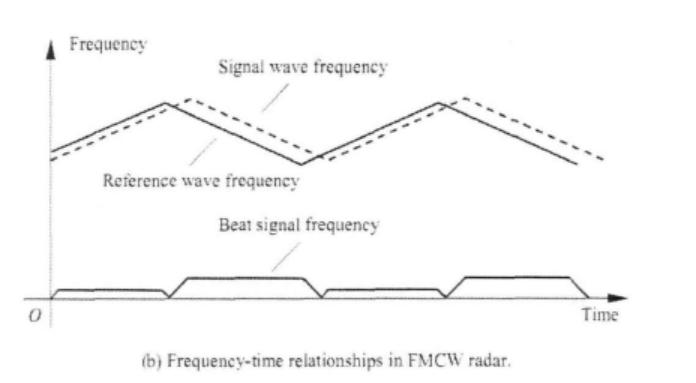
这个图就显而易见,有一个信号发生器发出频率随时间呈三角波变化的信号给发射机(激光雷达发出信号),然后接收机接收这个频率呈三角状变化的信号,回波的频率变化规律与发射的相同,但是存在时间延迟,这就导致相同时间的频率有微小的差别。通过对两个信号的拍频测量就可以得到距离信息。
数学几何解释原理:
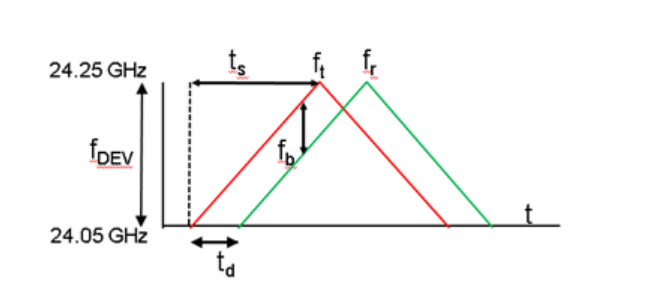
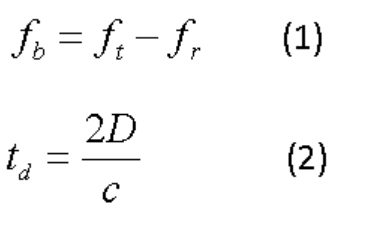
根据三角形相似:


其中D为探测的距离,fb为频率差,c为光速,ts为三角波调频的半周期,fDEV为调频范围,所以现在距离在其他值确定的情况下是频率差的函数,

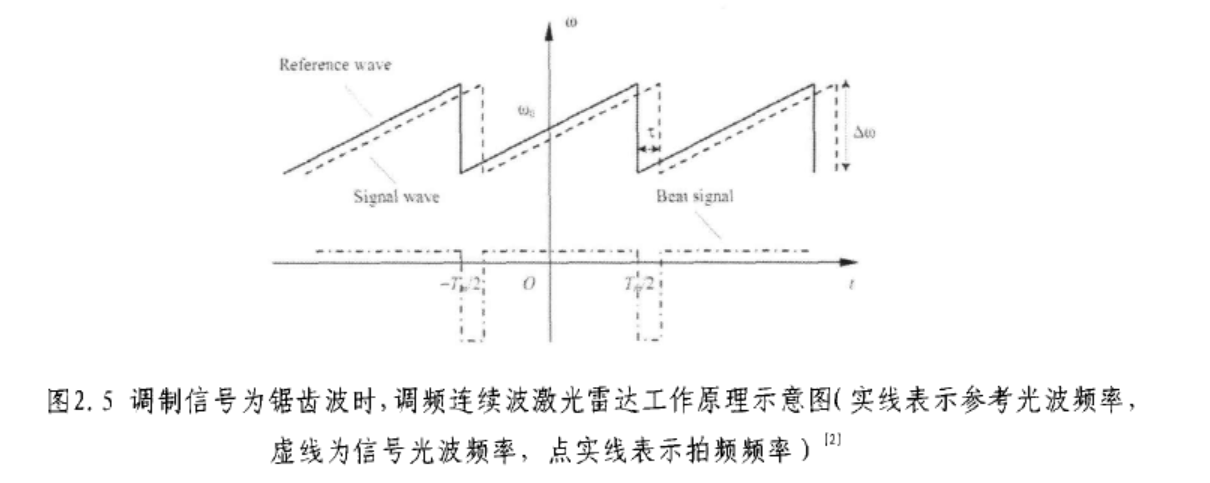
range resolution 由上式决定,它还等于 ;因此雷达的分辨率由频率的扫描范围决定,范围越大,精度越高。以上只是检测不动的物体,如果是检测移动的物体则会带来多普勒频移,如下图所示:

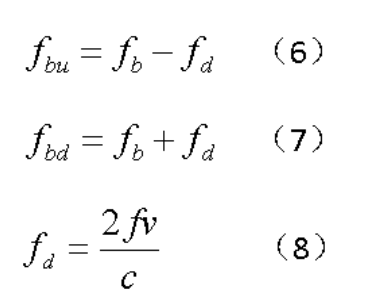
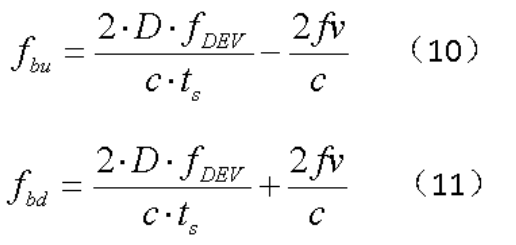
上式中,fb是静止时的拍频,fd是多普勒频移由式8决定,f是发射信号的中心频率,v是物体移动的速度,将678代入右边式子得:
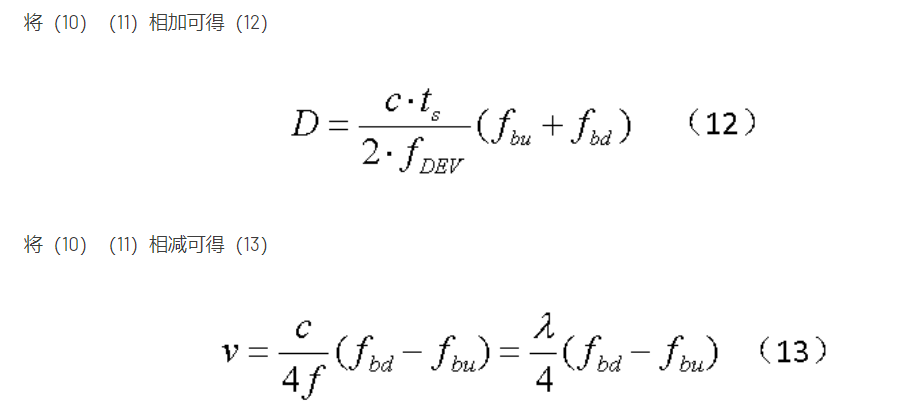
式12有误,应该是分母上应该是4倍的fdev。
参考: FMCW 雷达基本原理 - 讨论 - 中文资源库 - EngineerZone
还可以参考这个:https://blog.csdn.net/xinghuanmeiying/article/details/80671532?
基于光学调频连续波干涉解释原理:
以锯齿波做调制信号为例,来说明调频连续波干涉的原理;
单个周期内,参考光的角频率是,
,
表示角频率的调制范围,
表示角频率的调制周期,可以将参考光波和信号光波分别表示为:
![]()
![]()
![]() 为信号光波相对参考光波的时间延迟,进而可以得到干涉场的光强:
为信号光波相对参考光波的时间延迟,进而可以得到干涉场的光强:

由于光源的相干长度和频率调谐范围有限,可以忽略二次项的影响,将干涉信号简化为:

从而得到干涉信号的拍频:

FMCW激光雷达的位移检测试验分析:
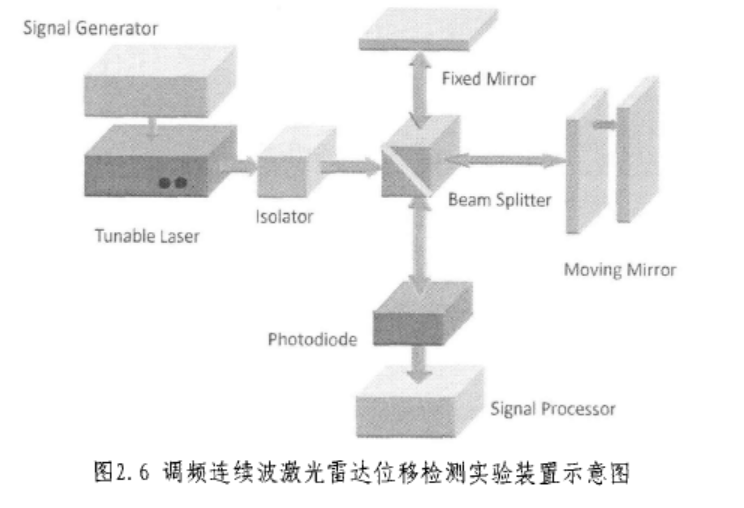
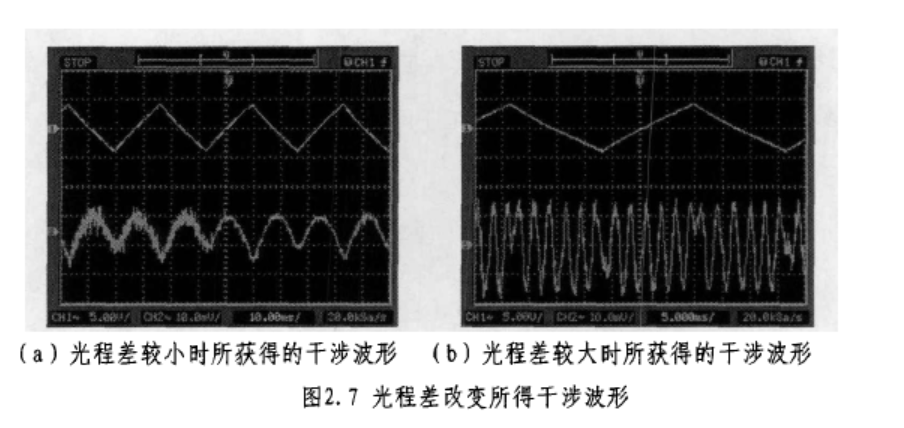
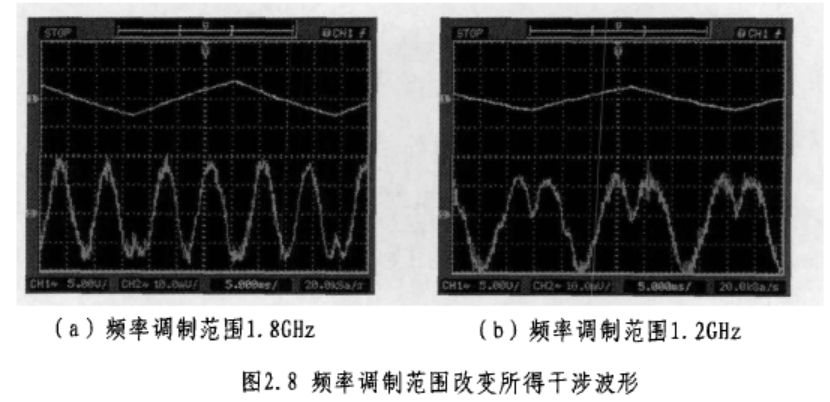
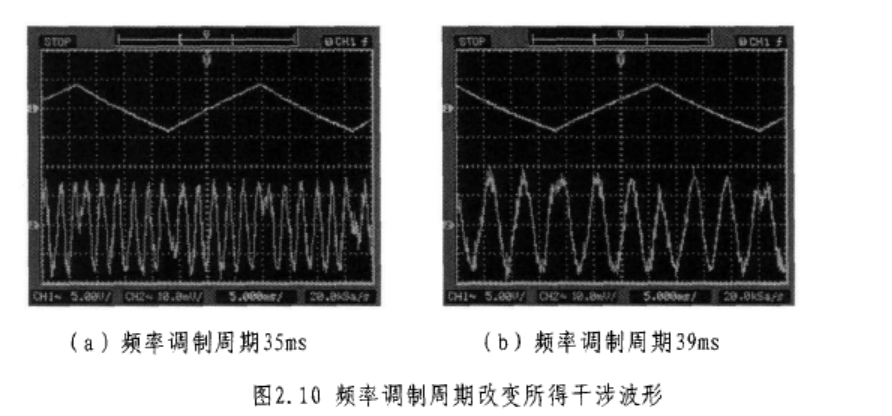
结论:激光雷达测距所得的干涉拍频大小与两束光波的光程差和激光器的频率调制范围呈正比,与激光器的调制周期呈反比。该理论可以扩展至多光束干涉,建立各束光波之间光程差和光强之间的关系,用于分析物质的性质,如对速率,应力,角速度,散射系数的等性质的测量。要想准确的测量,需要实现大范围无跳模高速连续调谐,无跳模是关键也是难点,接下来会找个时间单独写一下无跳模即连续调谐的难点所在。
参考:《调频连续激光雷达FMCW应用于无创血糖检测的探索研究》

















 214
214

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









