







文章目录
d-separation
三种类型:
- Serial connection (head-to-tail)
- Diverging connection (tail-to-tail)
- Converging connection
公式推导
链式法则
P ( X 1 , X 2 , . . . , X n ) = P ( X 1 ∣ X 2 , . . . , X n ) P ( X 2 ∣ X 3 , . . . , X n ) . . . P ( X n − 1 ∣ X n ) P ( X n ) P(X_1,X_2,...,X_n)=P(X_1|X_2,...,X_n)P(X_2|X_3,...,X_n)...P(X_{n-1}|X_n)P(X_n) P(X1,X2,...,Xn)=P(X1∣X2,...,Xn)P(X2∣X3,...,Xn)...P(Xn−1∣Xn)P(Xn)
贝叶斯网络定义:
P
(
X
1
,
X
2
,
.
.
.
,
X
n
)
=
∏
i
=
1
n
P
(
X
i
∣
P
A
(
X
i
)
)
P(X_1,X_2,...,X_n)=\prod^n_{i=1}P(X_i|PA(X_i))
P(X1,X2,...,Xn)=i=1∏nP(Xi∣PA(Xi))

Serial connection (head-to-tail)
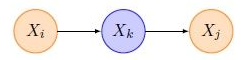
不观测 X k X_k Xk
P ( X i , X j ) = ∑ x k P ( X i , X j , X k ) = P ( X i ) P ( X j ∣ X i ) P(X_i,X_j)=\sum_{x_k}P(X_i,X_j,X_k)=P(X_i)P(X_j|X_i) P(Xi,Xj)=xk∑P(Xi,Xj,Xk)=P(Xi)P(Xj∣Xi)
结果:X与Y并不是独立事件
观测 X k X_k Xk
P ( X i , X k , X j ) = P ( X i ) P ( X k ∣ X i ) P ( X j ∣ X k ) P(X_i,X_k,X_j)=P(X_i)P(X_k|X_i)P(X_j|X_k) P(Xi,Xk,Xj)=P(Xi)P(Xk∣Xi)P(Xj∣Xk)
P ( X i , X j ∣ X k ) = P ( X i , X k , X j ) P ( X k ) = P ( X i ) P ( X k ∣ X i ) P ( X j ∣ X k ) P ( X k ) = P ( X i , X j ) P ( X j ∣ X k ) P ( X k ) = P ( X i ∣ X k ) P ( X j ∣ X k ) P(X_i,X_j|X_k)=\frac{P(X_i,X_k,X_j)}{P(X_k)} =\frac{P(X_i)P(X_k|X_i)P(X_j|X_k)}{P(X_k)}=\frac{P(X_i,X_j)P(X_j|X_k)}{P(X_k)}=P(X_i|X_k)P(X_j|X_k) P(Xi,Xj∣Xk)=P(Xk)P(Xi,Xk,Xj)=P(Xk)P(Xi)P(Xk∣Xi)P(Xj∣Xk)=P(Xk)P(Xi,Xj)P(Xj∣Xk)=P(Xi∣Xk)P(Xj∣Xk)
结果: X i , X j X_i,X_j Xi,Xj关于 X k X_k Xk条件独立
Diverging connection (tail-to-tail)
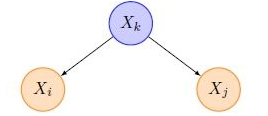
不观测 X k X_k Xk
P ( X i , X j ) = ∑ x k P ( X i , X j , X k ) = ∑ x k P ( X k ) P ( X j ∣ X k ) P ( X i ∣ X k ) P(X_i,X_j)=\sum_{x_k}P(X_i,X_j,X_k)=\sum_{x_k}P(X_k)P(X_j|X_k)P(X_i|X_k) P(Xi,Xj)=xk∑P(Xi,Xj,Xk)=xk∑P(Xk)P(Xj∣Xk)P(Xi∣Xk)
结果:X与Y并不是独立事件
观测 X k X_k Xk
P
(
X
i
,
X
k
,
X
j
)
=
P
(
X
k
)
P
(
X
i
∣
X
k
)
P
(
X
j
∣
X
k
)
P(X_i,X_k,X_j)=P(X_k)P(X_i|X_k)P(X_j|X_k)
P(Xi,Xk,Xj)=P(Xk)P(Xi∣Xk)P(Xj∣Xk)
P
(
X
i
,
X
j
∣
X
k
)
=
P
(
X
i
,
X
k
,
X
j
)
P
(
X
k
)
=
P
(
X
k
)
P
(
X
i
∣
X
k
)
P
(
X
j
∣
X
k
)
P
(
X
k
)
=
=
P
(
X
i
∣
X
k
)
P
(
X
j
∣
X
k
)
P(X_i,X_j|X_k)=\frac{P(X_i,X_k,X_j)}{P(X_k)} =\frac{P(X_k)P(X_i|X_k)P(X_j|X_k)}{P(X_k)}==P(X_i|X_k)P(X_j|X_k)
P(Xi,Xj∣Xk)=P(Xk)P(Xi,Xk,Xj)=P(Xk)P(Xk)P(Xi∣Xk)P(Xj∣Xk)==P(Xi∣Xk)P(Xj∣Xk)
结果: X i , X j X_i,X_j Xi,Xj关于 X k X_k Xk条件独立
Converging connection
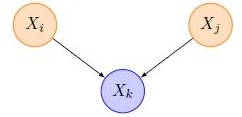
不观测 X k X_k Xk
P ( X i , X j ) = ∑ x k P ( X i , X j , X k ) = P ( X i ) P ( X j ) ∑ x k P ( X k ) = P ( X i ) P ( X j ) P(X_i,X_j)=\sum_{x_k}P(X_i,X_j,X_k)=P(X_i)P(X_j)\sum_{x_k}P(X_k)=P(X_i)P(X_j) P(Xi,Xj)=xk∑P(Xi,Xj,Xk)=P(Xi)P(Xj)xk∑P(Xk)=P(Xi)P(Xj)
结果:X与Y是独立事件
观测 X k X_k Xk
P ( X i , X j ∣ X k ) = P ( X i , X k , X j ) P ( X k ) = P ( X i ) P ( X j ) P ( X k ∣ X i , X j ) P ( X k ) P(X_i,X_j|X_k)=\frac{P(X_i,X_k,X_j)}{P(X_k)} =\frac{P(X_i)P(X_j)P(X_k|X_i,X_j)}{P(X_k)} P(Xi,Xj∣Xk)=P(Xk)P(Xi,Xk,Xj)=P(Xk)P(Xi)P(Xj)P(Xk∣Xi,Xj)
结果: X i , X j X_i,X_j Xi,Xj关于 X k X_k Xk
不是条件独立
定义
在不同的已知条件下判断A,B是否属于D-Separationd时会得到不同的结果。
比如已知了C下可能判断出A 和B是d分离的,
但如果不知道c或者已知为节点D的状态或者不知道任何其他节点的状态,则可能得出的结果是A,B未分离的。
定义 D-Separation: 对于 DAG 图 E,且A,B是图中的两个节点,对于A和B之间的每个结点C,如果节点C满足如下两个条件之一,则认为A,B是D-Separationd:
- the connection of C is
serialordivergingand the state of C is observed; - the connection of C is
convergingand neither the state of C nor the state of any descendant of C is observed
简单的来说:在C可观测时候 且 C是
serial或者diverging连接时候,A,B是d分离的(独立);在C不可观测时候 且 C是converging连接时候,A,B是d分离的(独立)
反之:在C不可观测时候 且 C是serial或者diverging连接时候,A,B不是d分离的(独立);在C 可观测时候 且 C是converging连接时候,A,B不是d分离的(独立)















 4049
4049











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









