









1、tf变换的主要目的就是统一机器人的所有坐标关系,它可以实现系统中任一个点在所有坐标系之间的坐标变换。
tf分为两个部分:
(1)监听tf变换:接收并缓存系统中发布的所有参考系变换,并从中查询所需要的参考系变换。
(2)广播tf变换:向系统中广播参考系之间的坐标变换关系。系统中更可能会存在多个不同部分的tf变换广播,每个广播都可以直接将参考系变换关系直接插入tf树中,不需要再进行同步。
如果你足够了解机器人的工作机制,通过查阅机器人话题会发现tf应用很广泛,而tf的api数据类型如下面几种形式出现:
数据类型 对应TF
Quaternion tf::Quaternion
Vector tf::Vector3
Point tf::Point
Pose tf::Pose
Transform tf::Transform
Quaternion 是表示四元数,vector3是一个3*1 的向量,point是一个表示一个点坐标,Pose是位姿(位姿是包括坐标以及方向) Transform是一个转换的模版。
2、我们借助ros wiki的图解来帮助我们了解具体请先看((http://wiki.ros.org/navigation/Tutorials/RobotSetup/TF))
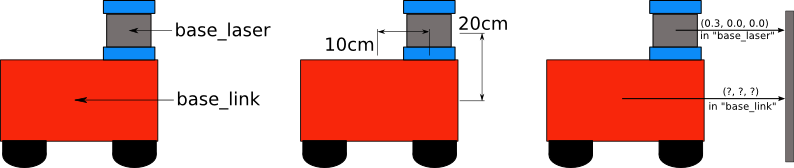
注意该图的laser坐标和base_link坐标。
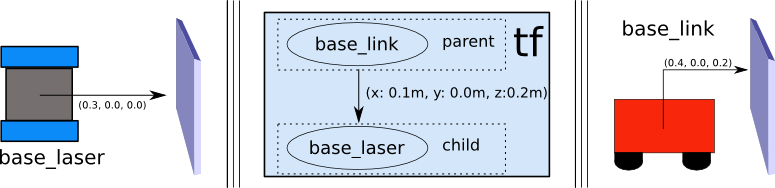
变换关系如下:
有了上面的理论支撑我们可以进行下一步的说明。
3、我们以激光雷达的坐标laser和机器人坐标不base_link为例来讲,做机器人导航时也需用到该tf转换。
我们先编写广播节点:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_publisher");
ros::NodeHandle n;
ros::Rate r(100);
tf::TransformBroadcaster broadcaster;
while(n.ok()){
broadcaster.sendTransform(
tf::StampedTransform(
tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)),
ros::Time::now(),"base_link", "laser"));
r.sleep();
}
}
分析主要程序:通过TransformBroadcaster 类进行发布TF转换关系,注意实现的格式,类中的第一个参数Quaternion(x,y,z,w)这四个参数都是角度信息(具体信息请自行查找);第二个参数为Vector3为坐标之间的关系转换。第四个参数是父系参考坐标系,即base_link,最后一个参数是子节点参考系,laser。
4、编写监听节点:
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h>
void transformPoint(const tf::TransformListener& listener){
//we'll create a point in the laser frame that we'd like to transform to the base_link frame
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "laser";
//we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time();
//just an arbitrary point in space
laser_point.point.x = 1.0;
laser_point.point.y = 0.2;
laser_point.point.z = 0.0;
try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"laser\" to \"base_link\": %s", ex.what());
}
}
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n;
tf::TransformListener listener(ros::Duration(10));
//we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));
ros::spin();
}
程序解析:上述用到tf::TransformListener对象,该对象会自动订阅ROS中的tf消息,并且管理所有的变换关系数据。在void transformPoint回到函数里,我们完成了坐标转换问题,从laser到base_link的转换。geometry_msgs::PointStamped laser_point;这个类就是实际中激光雷达所包含的信息数据,包括id,time。。
注意:该函数是关键transformPoint,它的第一个参数是需要转换到的参考系id,是base_link;第二个参数是需要转换的原始数据(激光雷达探测的数据);第三个参数转换完成的数据。base_point就是转换后的坐标!!!
上面是C++版本,想要python版本的请自行查看官网教程:(http://wiki.ros.org/tf/Tutorials)














 832
832











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









