







启动之前
首先使用moveit助手生成功能包(导入URDF,在这不在叙述)。
有个问题就是说在导入URDF的时候可能不显示他的模型,这个时候就很头疼,怎么办呢,一定要吧你的URDF文件加载到你的src空间中然后source一下,要不识别不到你的URDF包.一定一定别忘了.
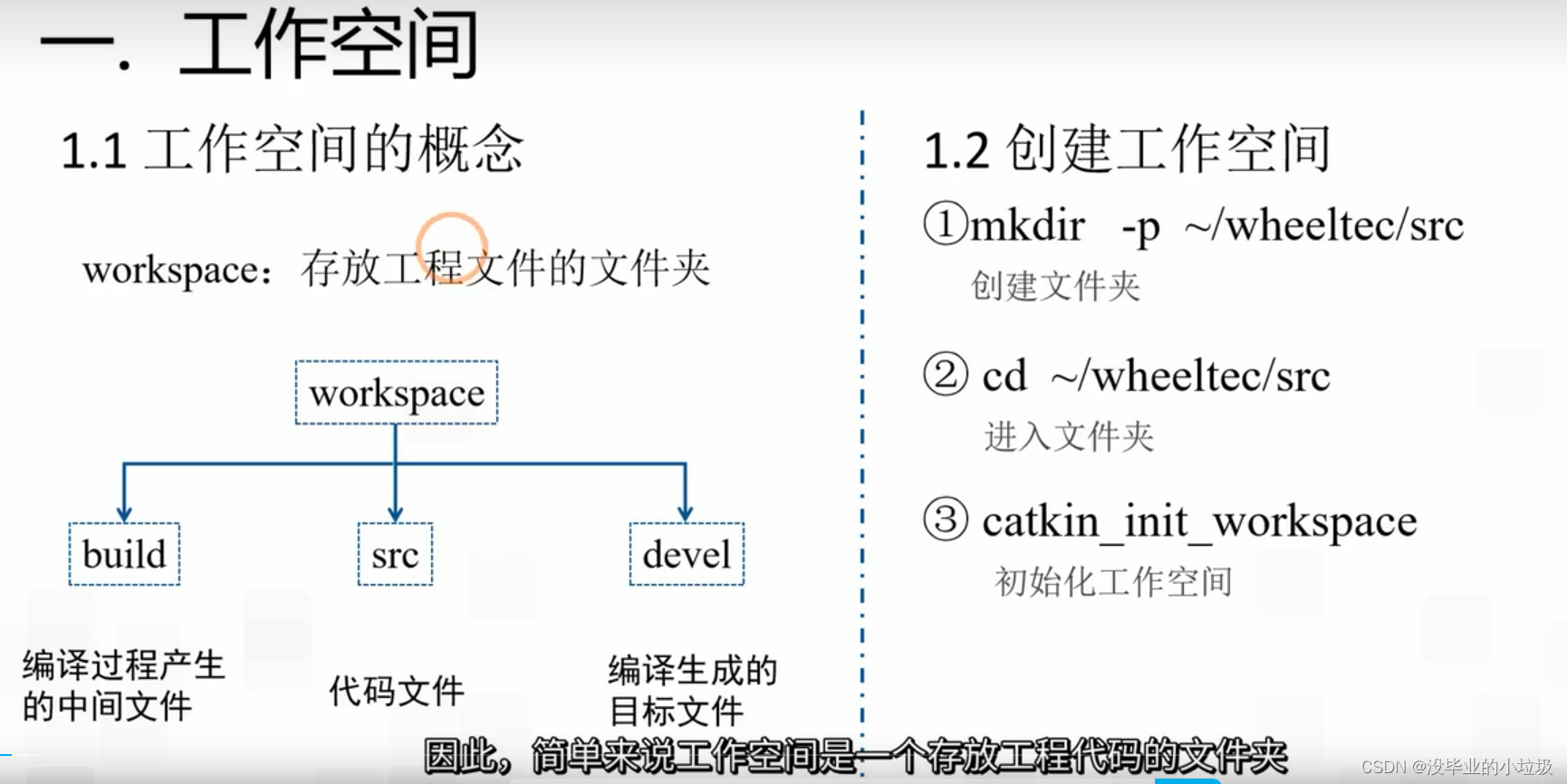
 moveit生成的功能包放在src文件下。自己首先要创建一个文件夹并设置为工作空间(初始化工作空间),编译功能包,设置环境变量(在工作空间下进行编译)。
moveit生成的功能包放在src文件下。自己首先要创建一个文件夹并设置为工作空间(初始化工作空间),编译功能包,设置环境变量(在工作空间下进行编译)。
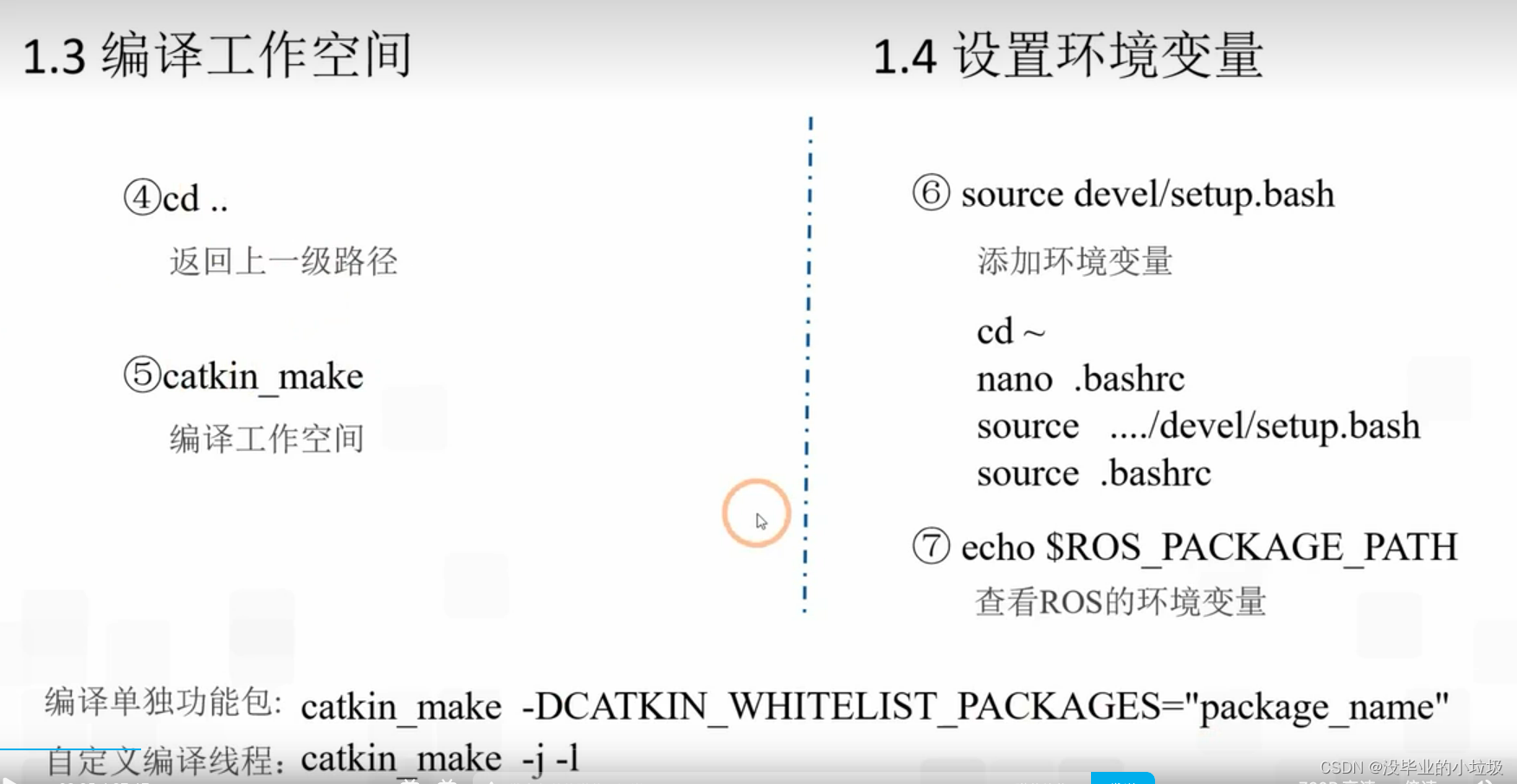
都设置好工作变量后,进入到工作空间,启动launch文件。
roslaunch fur_moveit_config demo.launch
roslaunch:
fur_moveit_config(这是功能包的名字)
demo.launch:启动文件
启动格式:
roslaunch 包名 xxx.launch
















 831
831











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











