







这里再重写一边VINS开启的新线程:
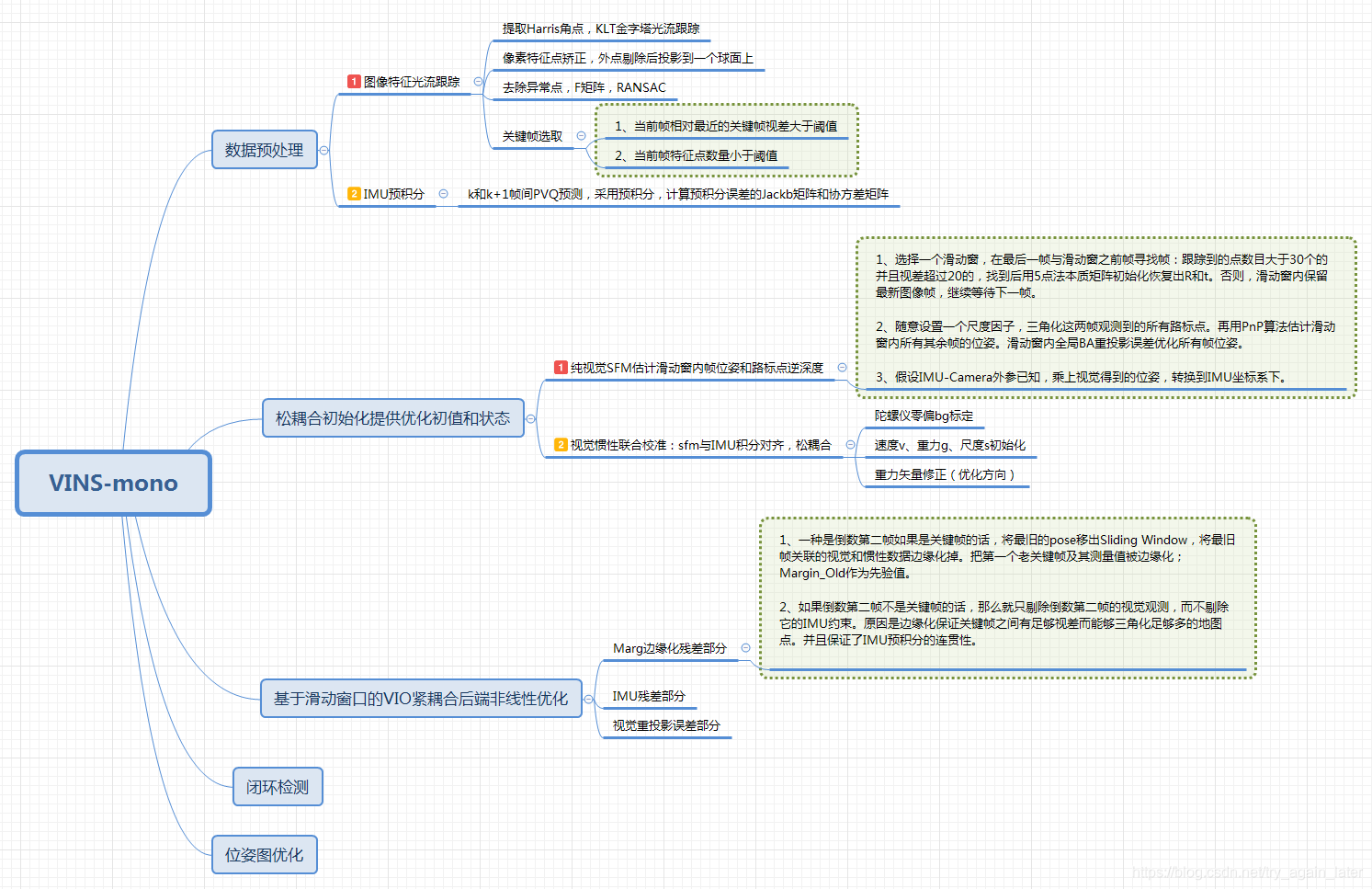
- 前端图像跟踪
- 后端非线性优化
- 闭环检测
- 闭环优化
闭环优化是跟在闭环检测之后步骤。首先回顾闭环检测的过程:
1、pose_graph_node.cpp开启process闭环检测线程;
2、创建新的关键帧KeyFrame,new KeyFrame;
2.1 computeWindowBRIEFPoint,提取已有点的描述子
2.2 computeBRIEFPoint:提取新的Fast特征点和描述子
3、PoseGraph::addKeyFrame,添加关键帧之后开启闭环检测
addKeyFrame()具体步骤如下:
1、detectLoop:通过DBoW找闭环帧
2、findConnection:计算当前帧和闭环帧的相对位姿
2.1 searchByBRIEFes:暴力匹配
2.2 PnPRANSAC:通过PnP计算闭环帧相对位姿
2.3 闭环帧位姿判断:当yaw差别小于30并且相对平移小于20才算闭环检测成功,返回上一步中的闭环帧位姿。
3、闭环检测成功,开启闭环优化
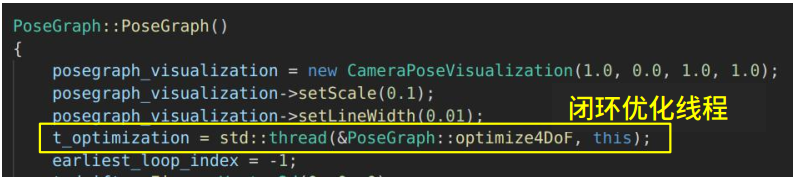
讲到这,都没有看到哪里开启了闭环优化线程,其实闭环优化线程的开启在PoseGraph()构造函数中,具体代码如下:
闭环node:还是从CMakeLists.txt开始看
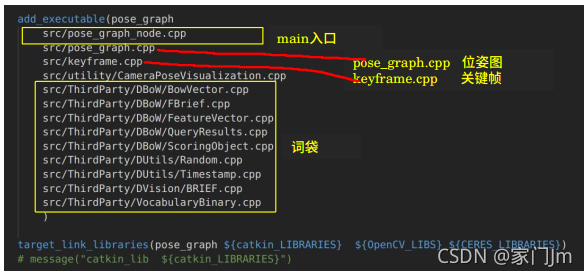
闭环检测:addKeyFrame()

闭环优化:optimize4DoF

















 5720
5720











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











