








[原文链接] 激光雷达功能拆解 看看为啥这么重要!
要点速览
一、自动驾驶汽车多种传感器各有优劣,多传感器融合是共识。
1、激光雷达能够获得高清的三维环境感知信息,但是价格比较贵。
2、摄像头能够获得丰富的纹理,价格也合适,但是受环境光照影响比较大。
3、毫米波雷达在雨雾天气性能优越,但是分辨率比较低。
二、激光雷达是自动驾驶汽车不可或缺的传感器,具有5大功能。
1、障碍物检测。
2、障碍物分类。
3、障碍物跟踪。
5、实时定位
三、激光雷达分为扫描式和非扫描式两大类。
1、扫描式激光雷达通过逐点扫描测距,又分为机械扫描雷达、基于MEMS微机电系统的雷达,以及相控阵雷达三种。
2、非扫描式激光雷达就是Flash雷达,像手电筒一样打出去一个面阵光测距。
3、从另外一个角度说,机械式和MEMS都属于机械雷达,而相控阵和Flash则属于固态雷达。
机械式雷达目前比较成熟,但硬件成本贵、量产困难,且稳定性也有待提升,目前很多公司都在向固态激光雷达方向发展。
四、激光雷达通过SLAM技术生成高精地图并定位。
1、自动驾驶汽车需要利用激光雷达、摄像头等传感器感知外部环境、构建环境模型并利用该模型确定车辆所在的位置,这套技术被称为SLAM。
基于摄像头等纯视觉传感器的SLAM被称为VSLAM,获取数据成本较低,数据量丰富,但是受光照影响比较大。
基于激光雷达的SLAM就不受光照影响,数据量比较少,创建的地图精度高,但是价格贵。
2、创建SLAM系统的时候,主要考虑稳定性、精度、计算量和传感器成本四大要素。
3、激光雷达是依靠将车辆的初始位置与高精地图信息进行比对来获得精确位置。
首先,GPS、IMU和轮速等传感器给出一个初始(大概)的位置。
其次,将激光雷达的局部点云信息进行特征提取,并结合初始位置获得全局坐标系下的矢量特征。
最后,将上一步的矢量特征跟高精地图的特征信息进行匹配,得出精确的全球定位。
今天的分享分为四部分,第一部分是激光雷达是无人驾驶不可或缺的传感器,第二部分和第三部分是LiDAR在自动驾驶中的应用,包括地图创建和定位。第四个是速腾如何贡献力量来加速LiDAR的应用。
一、激光雷达是自动驾驶不可或缺的传感器
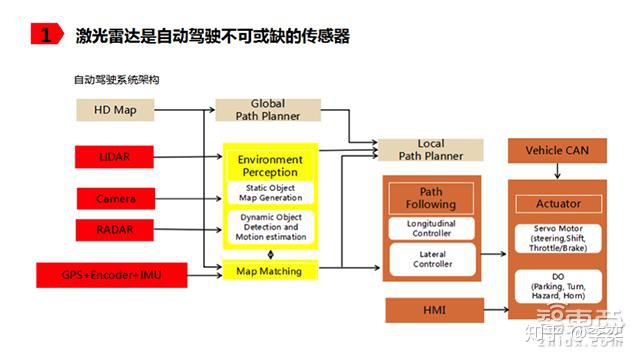
上面这张图是相对通用的自动驾驶的系统框架,左边的部分是传感器以及高精地图。像高德的谷总所说,高精地图其实是用于自动驾驶的专题图,所以我们也可以将高精地图理解为一个特殊的传感器,除了高精度地图之外还有激光雷达、摄像头和毫米波雷达。中间部分是负责障物检测和识别分类的定位感知层,最右边的部分是路径规划和执行层。
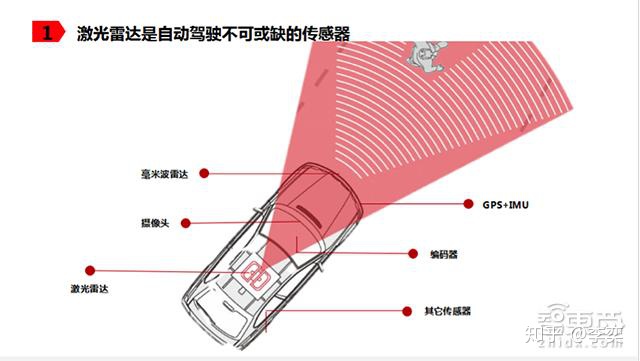
这张图是传感器的介绍,左边的激光雷达、摄像头和毫米波雷达这三个传感器主要是用于感知物体,而右边GPS、IMU和Encoder(编码器)这些主要是用于定位。激光雷达、摄像头和毫米波雷达各有优缺点。激光雷达能够获取高清的三维环境感知的信息,但是价格比较昂贵。摄像头能够获取比激光雷达更加丰富的纹理,价格也适合,但是受光照影响比较大。毫米波雷达在雨雾天气的性能优越,但是分辨效果比较弱。各种传感器各有优缺点,因而目前采用多传感器融合的方案是大家达成的共识。
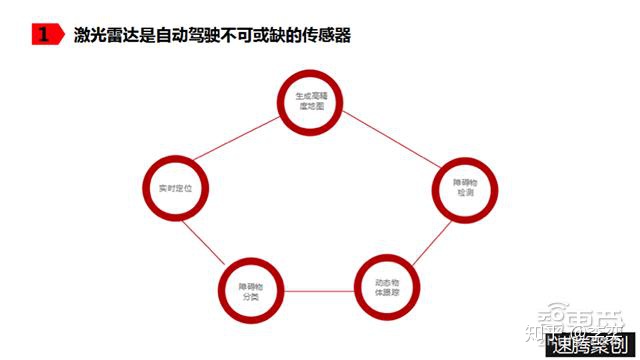
激光雷达能在哪几个部分进行起作用?激光雷达在生成高精地图中是一个非常重要的传感器,同时我们可以利用激光雷达进行实时定位,障碍物的检测、分类和跟踪。

接下来讲一下激光雷达的行业发展的情况。我把激光雷达分为两种,一种是扫描式雷达,一种是非扫描式雷达。扫描式雷达又分为Mechamical Scanning LiDAR,基于MEMS的LiDAR,以及Optical Phase array LiDAR(相控阵雷达),非扫描式雷达就是Flash LiDAR,它打出去是一个面阵光,通过面阵光来进行测距。为什么这样分雷达呢?因为扫描式雷达是通过逐点扫描来进行测距,而flash LiDAR这种非扫描式雷达就不是逐点扫描,而是像手电筒一样发射一个面阵光进行测距。
机械式雷达存在两个问题,第一个是目前的硬件成本比较贵,第二个是量产性受到限制,其次产品不容易过车规。所以大家都很急迫地往固态的方向发展,固态有基于MEMS,MEMS当中还有微机械的部分,还有全固态的相控阵、FlashLiDAR。大家在固态雷达的研发过程中选择了不同的方向,有些在做MEMS,有些在做OPA,有些在做FLash,目前来看各种雷达都有各自的优缺点。
二、Lidar在自动驾驶中的应用——地图创建
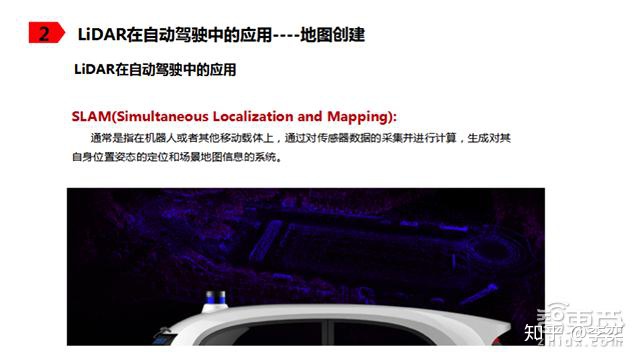
现在开始讲雷达在自动驾驶中的第一个应用——地图创建。无人驾驶车辆需要利用携带的激光雷达、视觉系统等传感器来感知环境,并且构建环境的模型,并利用该模型来确定车辆所在的位置。这同时考量了无人驾驶车辆在地图创建和自身定位的技术, Smith和Cheeseman在九十年代首次提出了同时定位和制图的思想,也就是SLAM。
基本思想就是利用已经创建的地图修正基于运动模型的机器人的位置姿态误差,同时根据可靠的位置姿态创建出一个更高精度的地图,SLAM自提出以来,一直受到国内外研究人员的关注,逐渐变成一个关键技术。SLAM其实是一个蛋生鸡鸡生蛋的思想,精确的定位能够获取精确的地图信息,精确的地图也能够获取精确的定位信息,它们相辅相成。根据传感器的划分可以分为基于视觉的SLAM,即VSLAM,和基于雷达的SLAM。这两种方式的优缺点的不同主要是由于传感器的原始数据的不同。
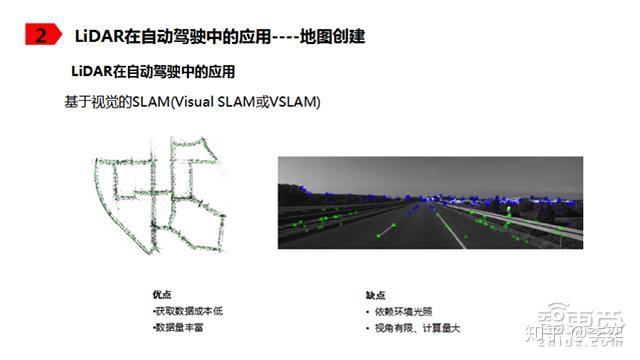
基于视觉的SlAM的优点是获取数据的成本比较低,就像摄像头,它的价格比较合适,数据量比较丰富,对于周围环境的描述也比较充分,但最大的缺点是环境光照对它的影响会比较大,同时视觉有限。目前我们在用的摄像头的视觉是没有那么大的。假设如果采用360度的全景,它的畸变会比较严重,这样它后续的计算量就会比较大。
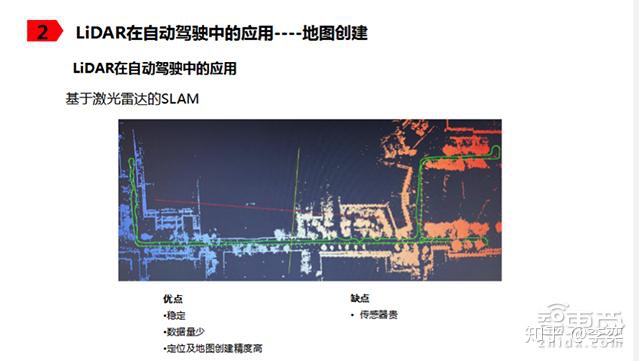
基于雷达的SLAM的优点就是比较稳定,它不会受到环境光照的影响,白天晚上都可以用,数据量也比较少,定位和地图创建的精度高,目前最主要的缺点是传感器价格昂贵。
所以以前我们在做SLAM,大家是普遍在室外使用基于雷达的SLAM,而在室内,基于视觉和雷达的SLAM都会使用。
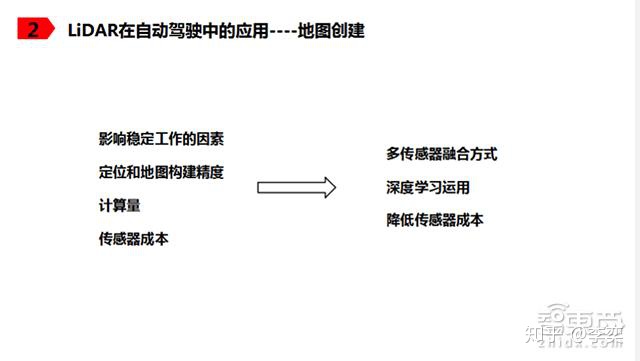
创建SLAM系统的时候,我们主要考虑几个维度,第一个是影响稳定工作的因素,第二个是定位和地图创建的精度,第三个是计算量,第四个是传感器的成本。
从第一个维度(工作稳定)上来看,VSLAM容易受到环境光照的影响,依赖纹理色彩。当处于无纹理环境时,如果两边都是白色的墙,它是无法实现定位和制图的。而激光雷达是依靠结构化信息作为特征对环境进行感知并实行SLAM,如果处于又长又直的通道,它的性能就会比较差。但是如果结合激光雷达输出的反射率要素,也就是雷达的输出除了XYZ还有一个反射率I,那么情况就会好很多,但是毕竟它的信息量不够多,所以效果并不会特别好。最终最可靠的方式还是由多传感器融合来完成。
第二个考虑的维度是定位和地图构建的精度,从维度上来看,激光雷达远远优于这个基于视觉的方式。
从第三维度(计算量需求)来看,激光雷达的输出是点云。点云这个词给人感觉数据量很大,但是事实并不是。像速腾现在的32线激光雷达一秒的输出数据量不到三兆,但是视觉的一张图片就有好几兆了,一秒输出如果按20帧算,可能要20张图片甚至更高,所以从这点上看,视觉的数据量毫无疑问会比激光雷达输出多得多。从硬件支持来看的,激光雷达不需要性能特别强的处理芯片,而视觉算法就需要,但是现在的芯片发展得非常快,像英特尔、英伟达等厂家在硬件的处理能力上也在加速发展,未来不会成为一个很大的瓶颈。
从第四个维度(传感器的成本)来看,激光雷达目前成本比较贵,像Sick或者hokuyo的中等距离单线激光雷达,价格要上万块钱,而速腾的16线激光雷达也要几万。因而降低成本是必然的趋势,一方面通过规模化的生产降低成本,另一方面往固态方向上进行技术创新,朝着固态的低成本和可量产化的方向去发展,目前包括速腾在内的国内外厂家都在加速创新,我相信2到3年内成本不会是问题。
通过这四个维度的结合,我们可以得出第一点是多传感器融合的方式是一个必然的趋势,第二点是特征提取会从基本的定义特征走到深度学习中去,同时激光雷达的创新成本也往降低成本的方向去发展。
大家可以先看一下SLAM的demo。(视频在文末)
三、Lidar在自动驾驶中的应用——定位
接下来讲定位的问题。(在以前,就将移动机器人的定位导航定义成三个问题(无人驾驶的车辆也是属于移动机器人的范畴),我在哪?我要去哪里?我应该怎么去?
无人驾驶的定位的问题,其实是无人驾驶车辆通过自身所携带的内部或外部的传感器来确定自身在道路环境中的位置。
无人驾驶车辆的定位和地图创建是密切相关的,准确的地图信息有利于实现高精定位,而高精定位又是构建可靠的地图信息的前提。目前我们使用GPS的定位精度肯定是不够的,它基本上就是米级。
我们现在手机的定位导航在自主驾驶肯定是精度不够,同时由于周围的建筑物密集、高楼林立或者树比较高的,GPS信号也容易受到减弱,甚至屏蔽,这样是非常危险。依靠地面基站的RTK的方式能够在很大的程度上解决误差问题,达到精度的要求。它能够解决一些在GPS传递过程中的问题,但是依然没有没办法解决在隧道或者高楼林立的环境中的一些信号中断问题。所以增加其他的方式进行稳定的高精定位是非常有必要的。
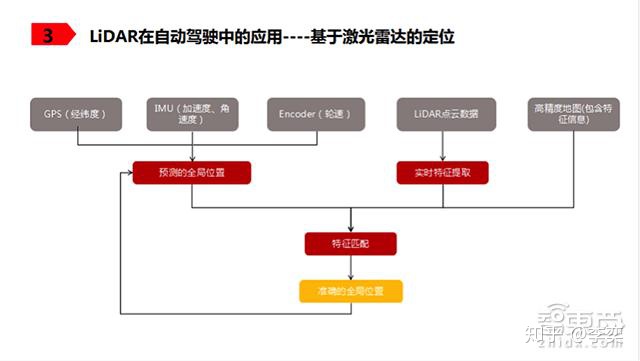
基于视觉或激光雷达的定位是常用的定位方法。我们这里重点讲一下激光定位。这是一个基于激光雷达定位的框架,首先GPS给定初始位置,通过IMU和车辆的Encoder(编码器)可以得到车辆的初始位置,然后将激光雷达的局部点云信息,包括点线面的几何信息和语义信息进行特征提取,并结合车辆初始位置进行空间变化,获取基于全局坐标系下的矢量特征,接着将这些特征跟高精度地图的特征信息进行匹配,最后获取一个准确的定位。

基于雷达的定位还是会走多传感器融合的方式,如结合GPS、IMU、Encoder或者摄像头,来进行定位。IMU和Encoder其实能够很好地解决一些初始位置的定位问题,初始位置是非常关键,而GPS相当于是做全局定位。
比如GPS的精度在分米级别,那么我们是能够保证在所有的定位精度在分米级别,如果GPS的定位精度在厘米级别,那么我们先保证精度在厘米级别,GPS会限制住最大误差。这种基于GPS、IMU、Encoder、雷达和高精度地图的定位方式是一个多传感器融合的方式。

















 4611
4611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









