






使用激光雷达进行定位,不同于GPS能够直接得到地球表面的绝对坐标,也不同于IMU和里程计那样可以通过积分获得位姿数据;它需要事先对某一区域进行建图,然后利用LiDAR、摄像机、IMU等传感器数据,与高精地图的先验特征的匹配关系计算出当前相对于点云图的位姿。
常用的激光雷达定位方式示例
1. 基于点云图定位
在定位之前,需要通过录制环境点云信息得到该区域的先验点云图,而后假设当前车辆位于该区域中的某一位置,通过车载激光雷达得到的单帧点云数据,与先验点云图进行匹配,若环境不发生较大变化,中能在先验点云图中找到最佳匹配位点,该位点对应的坐标即为车辆的相对坐标。
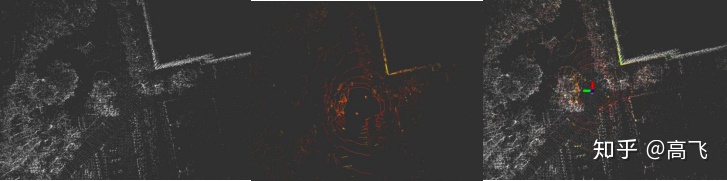
该方式常用的算法包括NDT(正态分布变换)、ICP(迭代最近点)及其衍生算法等,在autoware中包括NDT_matching与ICP_matching功能包, 这些方式需要对先验点云图与当前点云数据的配准情况进行评估,通过不断迭代使得匹配位点收敛,最终得到最优结果,但该方式并不适用于大范围先验点云图的匹配,因为遍历全部点云并是一个非常巨大的工作量,所以往往需要估计初始位姿,在该位姿的一定范围内进行匹配可以大大减少匹配运算量和迭代次数,因而初
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 344
344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









