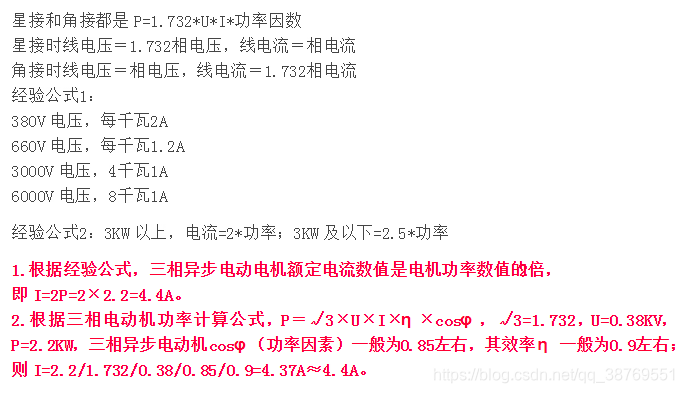
驱动电机主要是靠电流。根据法拉第电动机原理,通电导线在磁场中产生电动力,电动力的大小与电流成正比。所以是电流,而不是说电压。(当通电导线用电阻较大的材料时,比如有铝导线,产生同样的电流要更高的电压。) 举例: L298N 是一种双H桥电机驱动芯片,其中每个H桥可以提供2A的电流,功率部分的供电电压范围是2.5-48v,逻辑部分5v供电,接受5vTTL电平。一般情况下,功率部分的电压应大于6V否则芯片可能不能正常工作。


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言














 本文深入探讨了驱动电机的工作原理,强调电流在电机运转中的关键作用。根据法拉第电动机原理,电流通过导线在磁场中产生电动力,推动电机运转。文中还介绍了L298N这一双H桥电机驱动芯片,详细解释了其电流供应和电压需求,为读者提供了电机驱动的实际案例。
本文深入探讨了驱动电机的工作原理,强调电流在电机运转中的关键作用。根据法拉第电动机原理,电流通过导线在磁场中产生电动力,推动电机运转。文中还介绍了L298N这一双H桥电机驱动芯片,详细解释了其电流供应和电压需求,为读者提供了电机驱动的实际案例。


















 9940
9940







