







 本文介绍了如何设计并组装摄像头云台,使用树莓派进行控制。通过3D建模软件设计舵机支架,选用舵机和摄像头组成云台。在实物组装过程中,需要注意舵机的选择和角度校准。使用PCA9685控制器进行接线,并配置树莓派的I2C通信。最终编写程序实现摄像头的两个自由度控制,通过随机角度测试验证功能。
本文介绍了如何设计并组装摄像头云台,使用树莓派进行控制。通过3D建模软件设计舵机支架,选用舵机和摄像头组成云台。在实物组装过程中,需要注意舵机的选择和角度校准。使用PCA9685控制器进行接线,并配置树莓派的I2C通信。最终编写程序实现摄像头的两个自由度控制,通过随机角度测试验证功能。
简介
本篇是摄像头云台的设计与使用方法,用树莓派进行控制,具体应用于我自制的多功能小车上边,目前整个小车也只是完成了摄像头部分,准备记录下来,摄像头云台一共两个自由度,分别为水平旋转和竖直旋转
三维模型的设计
我的想法是直接用舵机,舵机支架,摄像头来完成舵机云台,因为舵机支架具有很多种结构,能保证我们的基本需求
设计三维模型肯定要有一个三维画图软件,我选的solidworks,因为电脑上恰好有这个软件,不过我现在更喜欢inventer,画起来很舒服,不过这都是小问题
我向淘宝商家要了常用舵机支架的尺寸,我觉得这些都是标准件,为了调用方便,我直接把他们都画了出来,有些孔的尺寸会有一些小误差,不过事实证明,实物是没问题的

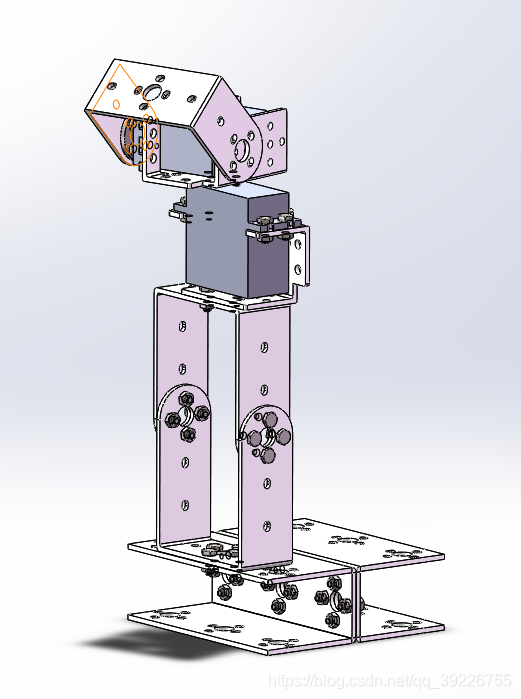
画完这些就是组装了,组装很简单,就像搭积木一样,把自己心里想的搭出来就好了,下边是我搭的相机云台
实物组装
做完这些就可以开始购物了,舵机支架很简单,想一想相机云台中的舵机应该不需要什么力气,所以买了便宜的舵机,结果舵机出乎我的意料,它不但力气小,还卡,还不稳定,所以大家看着买,我就不说在哪买的了
组装的时候一定要提前测好舵机角度,省的拆了重装,不要问我怎么知道的。
舵机云台实物如下:

看这个样子好像还不做,但是如果说这东西做完了,那想的就太简单了,这东西肯定不能用手转呀,我用的是树莓派进行控制,本来想着用树莓派供电着,结果又是让我惊喜,树莓派陷入了抽搐中,所以我们还需要一些东西,一个电源,一个控制器,因为以后要带机械臂什么的,树莓派小小的身躯肯定承受不住那么多舵机,所以控制器还是很有必要的
一个6V2300mA的电池,博
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1132
1132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









