






环境配置
以下仅为本人运行该开源项目的配置环境
Ubuntu16.04
ROS Kinetic
请参见官网
http://wiki.ros.org/cn/melodic/Installation
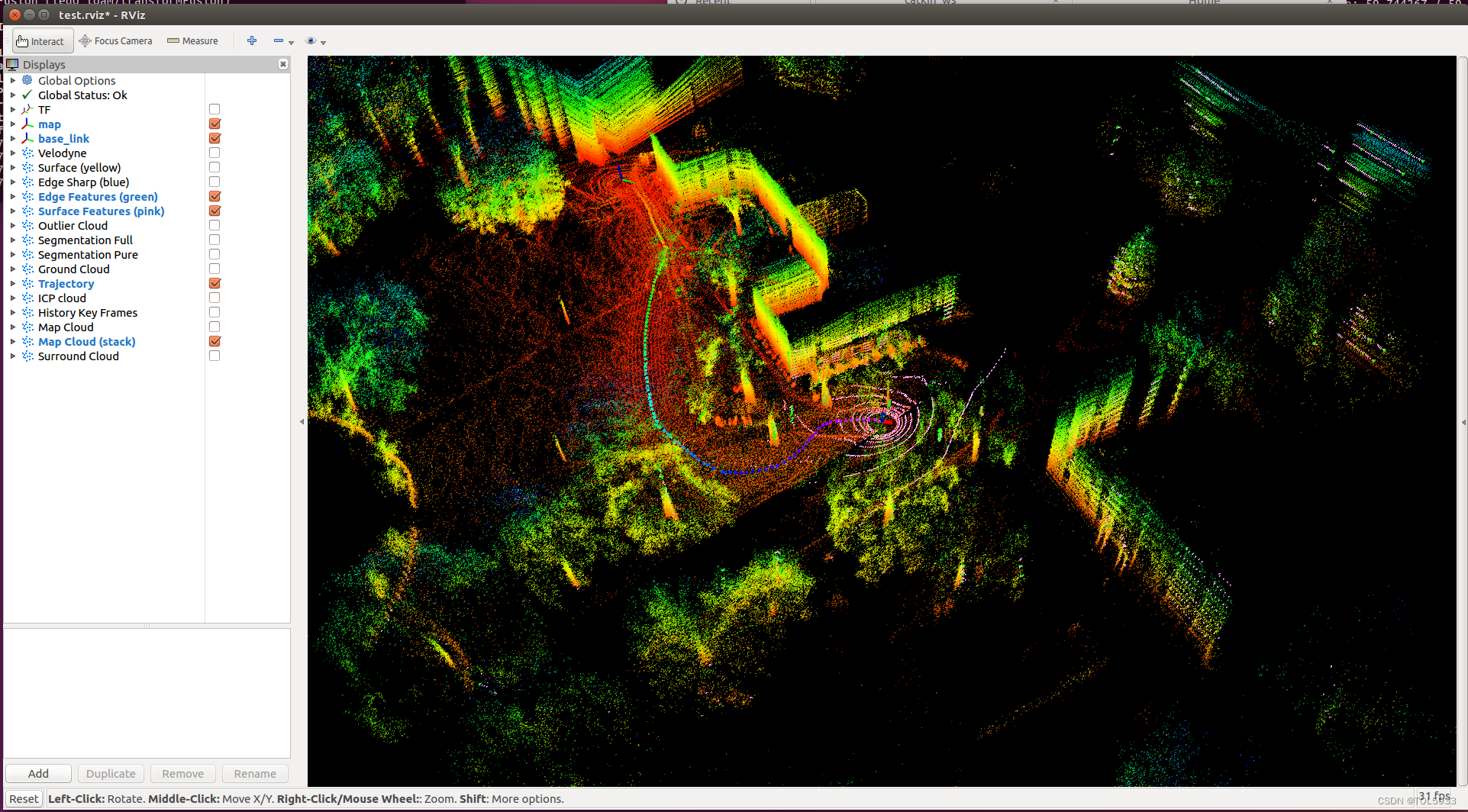
我见到了最大的坑,使用Ubuntu18.04+ROS Melodic会导致后续rviz概率性崩溃,即便运行成功,大概率只能看到轨迹,但无法看到扫描的雷达点云(浪费劳资时间)
ros-kinetic-pcl-ros
sudo apt-get install ros-kinetic-pcl-ros
执行上述命令会自行安装libpcl
gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
## 创建ROS工作空间并编译项目
下载并编译LeGO-LOAM项目
cd ~/catkin_ws/src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1
第一次编译代码时,需要在“catkin_make”后面添加“-j1”,用于生成一些消息类型。以后的编译不需要“-j1”。
离线运行LeGO-LOAM项目
打开三个窗口,依次执行下述命令
roscore
cd ~/catkin_ws
source devel/setup.bash
roslaunch lego_loam run.launch
rosbag play <你的包名>.bag --clock --topic /velodyne_points /imu/data
数据集下载路径https://drive.google.com/drive/folders/1_t5fX5yIqY-y6sAifY8pVWX4O9LCK5R2
或者使用NSH indoor outdoor数据集
nsh_indoor_outdoor.bag下载地址
链接: https://pan.baidu.com/s/1psN_qIht28uyyks5AVnhmA 密码: tec7
在线运行LeGO-LOAM项目
注意:修改 run.launch 文件中 /use_sim_time
<param name="/use_sim_time" value="false" /> # 在线建图设为"false",离线建图设为 "true"
打开三个窗口,依次执行下述命令
roscore
cd ~/catkin_ws
source devel/setup.bash
roslaunch lego_loam run.launch
打开雷达节点发布数据
本人使用Velodyne的VLS128雷达,参考了https://blog.csdn.net/Burannnn/article/details/125744682进行配置















 3124
3124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









