






一、源码地址:
二、依赖安装
本机ubuntu18.04 melodic
三、开始安装
如果已经创建过catkin_ws,直接cd过去就行
cd ~/catkin_ws/src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1
source ~/catkin_ws/devel/setup.bash四、运行:
终端1:
roslaunch lego_loam run.launch终端2:
rosbag play YOUR_DATASET_FOLDER/nsh_indoor_outdoor.bag --clock --topic /velodyne_points /imu/data--clock使用BAG的时钟
包下载地址:https://drive.google.com/file/d/1s05tBQOLNEDDurlg48KiUWxCp-YqYyGH/view
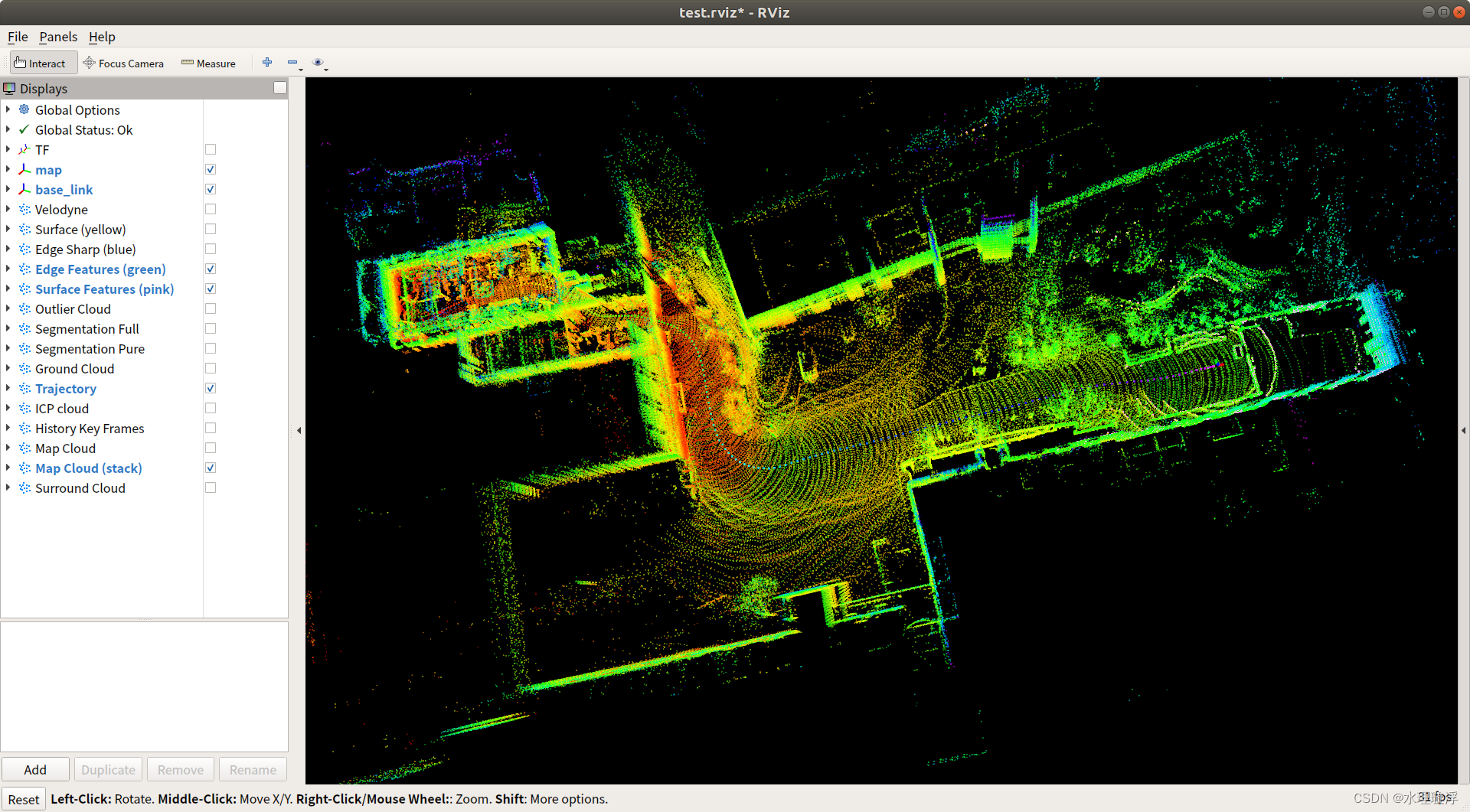
五、效果

















 854
854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











