







电机转子检测的目的
电机实现闭环需要电机的转速和转子实际位置的反馈量。其中对于转子位置的反馈量最为麻烦,因为电机的转子检测传感器不论是使用增量式编码器、绝对式编码器还是旋转变压器都需要检测传感器的安装位置与电机电角度的零位之间的偏差角。检测偏差角的过程实际上就是对位置的过程。
对位置的几种方法
通常我们使用的对位置的方法有如下几种:
1.给A相通电,其余两相给高阻态,此时电机应旋转到电机的电角度的0度,此时读取传感器的角度,即可求得偏差角。
2.通过给三相中的任意两相通直流电(电压应相对较低 10V左右,保证不会损坏电机),电机应旋转到对应的位置,例如给A相接直流电的+,C相接直流电的-,那么接下来电机旋转到的位置应该是电角度的30度左右。
3.使用id=0控制策略时,首先让电机以较慢的速度开环旋转,然后在某个时刻,开环角度保持不变,电机必然会停止旋转,这时候给d轴电流,q轴电流为0,则此时电机只有磁阻转矩做功,电机也会吸合在一个电角度上,该电角度是可以求出来的。后面会详细阐述。
4.同样使用id=0控制策略,与3方法基本一致,但最后停止旋转时,给定q轴电流为一个常数,d轴电流为0,此时应同样吸合在一个可以解算的电角度上。方法与前者类似,依旧会在后面阐述。
使用d轴电流吸合时的电角度解算
对于这个电角度的解算我使用了MATLAB和仿真两种验证方法。首先我们从坐标变换的角度可以发现假定三相电流为
其中w为三相的频率,t为时间,Im为三相电的幅值,delta为2/3*pi。那么经过Clarke和park变换后的dq轴电流应该是不变的,其dq轴电流的平方和即为定子电流的大小,此时d轴和定子电流的角度应该为0度。
对上述的三相电做Clarke和park变换至dq坐标系,并且解算Id=Im,Iq=0时候对应的wt=0。代码如下:
delta=2/3*pi;
syms Im ;
wt=0;
syms theta_elec;
Ia=Im*cos(wt);
Ib=Im*cos(wt-delta);
Ic=Im*cos(wt+delta);
Ialpha=2.0/3.0*(Ia-1/2.0*Ib-1/2.0*Ic);
Ibeta=2.0/3.0*(sqrt(3)/2.0*Ib-sqrt(3)/2.0*Ic);
Id=Ialpha*cos(theta_elec)+Ibeta*sin(theta_elec)==Im
Iq=Ibeta*cos(theta_elec)-Ialpha*sin(theta_elec)
theta=solve(Id,theta_elec)
该解算过程中将wt=0,也就是说三相电流的和矢量均在A相上,此时d轴上有最大的电流,q轴电流为0,则可以使得吸合力最大。保证吸合的准确性。
解算得到的结果是theta=0,即给Id电流为三相电的最大幅值Im,给Iq电流为0时,得到的电角度为0度,即使用给d轴电流吸合后的电角度为0度。
在仿真中给d轴电流,q轴给0,得到的电机三相电流如下图所示
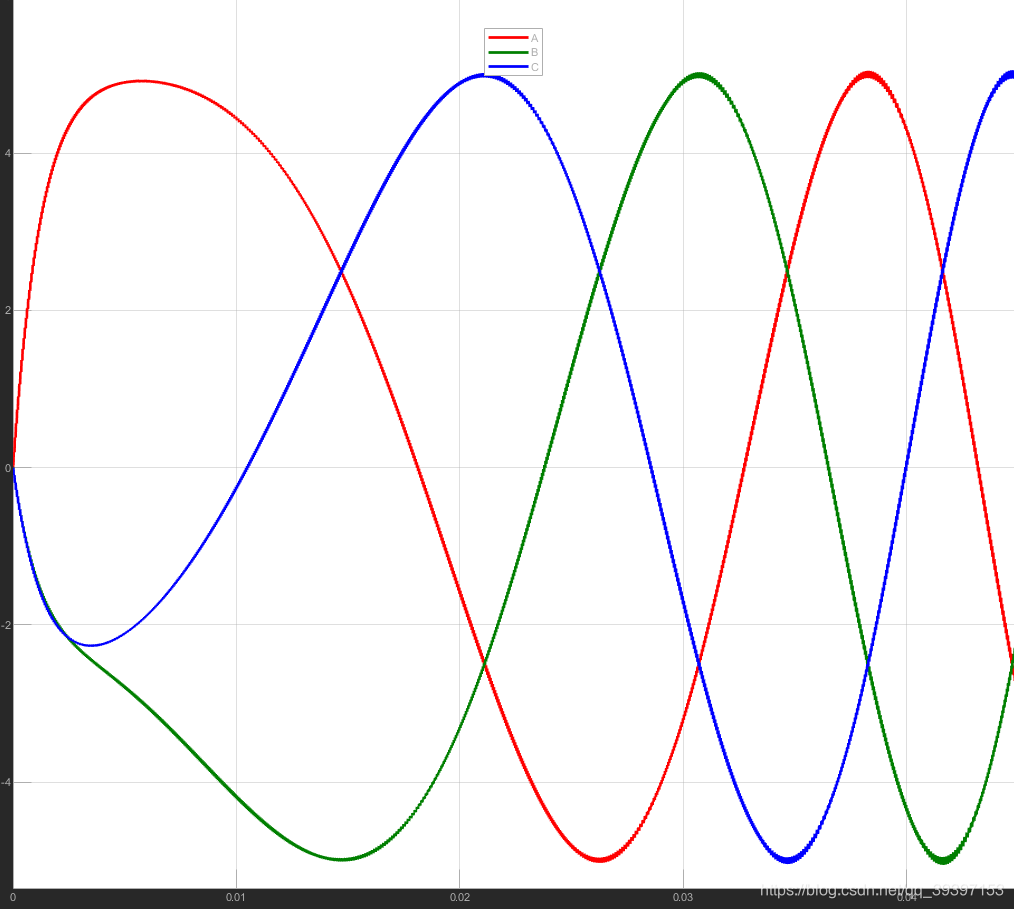
由此图可以看出,刚开始是启动状态,等到0.01s电流稳定时,A相对应的三角函数与上图wt=0时一致。
使用q轴电流吸合时的电角度解算
按照这个思路,那我们用q轴电流吸合的时候应该使得三相电合成的定子电流在y轴上,即使得wt=pi/2,就可以得到定子电流矢量合成的结果是在y轴上的。此时按照上面的方法进行解算,可以得到此时的电角度theta_elec为0。这意味着什么呢?这意味着此时我们的d轴是在A相电流上的,但转子是吸合在q轴上的,所以此时读写出来的实际的转子的电角度应该为pi/2。下面是代码
delta=2.0/3.0*pi;
syms Im theta_elec wt;
wt=pi/2;
Ia=Im*cos(wt);
Ib=Im*cos(wt-delta);
Ic=Im*cos(wt+delta);
Ialpha=2.0/3.0*(Ia-1/2.0*Ib-1/2.0*Ic)
Ibeta=2.0/3.0*sqrt(3)/2.0*(Ib-Ic)
Id=Ialpha*cos(theta_elec)+Ibeta*sin(theta_elec)==0
Iq=Ibeta*cos(theta_elec)-Ialpha*sin(theta_elec)
这个结果的解算比较复杂,但是最后带入电角度为0时,结果是正确的。
在仿真中给d轴电流,q轴给0,得到的电机三相电流如下图所示
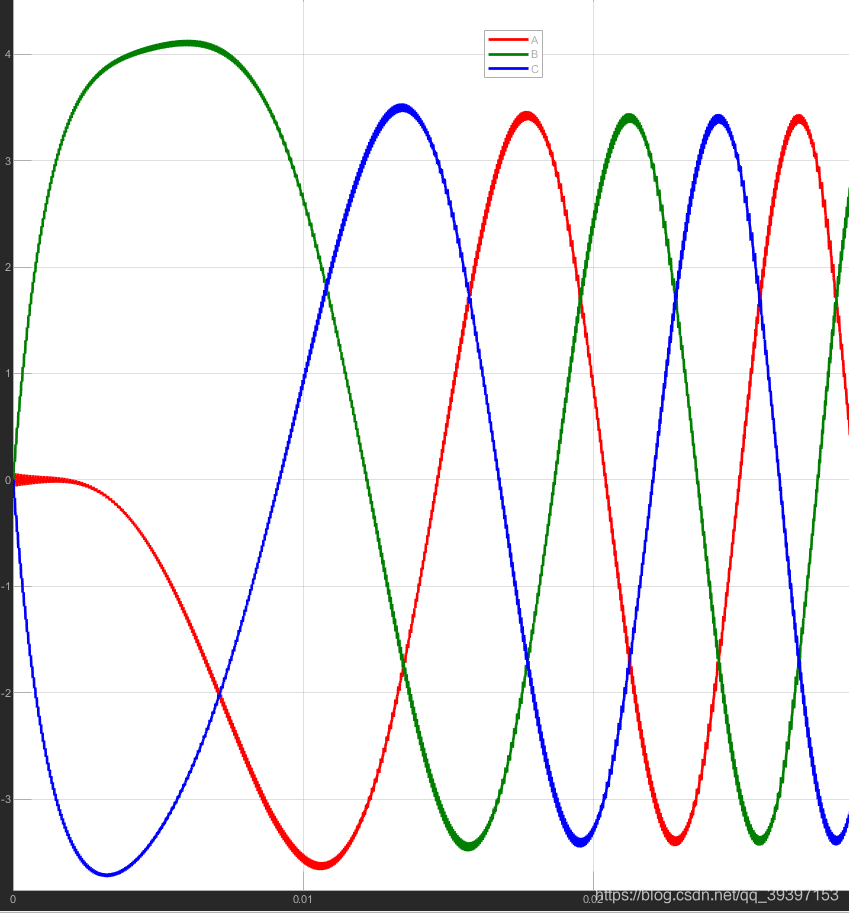
由此图可以看出,刚开始是启动状态,等到0.01s电流稳定时,A相对应的三角函数与上述的三角函数中角度加pi/2后的结果是一致的。
总结
网上看过很多资料,基本都是用d轴吸合或者直接给三相通电测得偏差角。但是在我看来,给三相通电这样做的方法并不是很好,首先是接线比较麻烦,其次是对实际工程代码编写中也不太友好。使用d轴吸合也不是非常推荐,因为他吸合的时候使用的是磁阻转矩,至少我使用的电机中,磁阻转矩大的电机不多,所以建议还是用q轴去吸合,这样得到的结果更为精确,不过影响也不大。
另外值得说明的是,作者在实际电机中测试过,使用d轴和q轴吸合的两种情况,其电角度确实差了大约pi/2。不过说到底,找个好的厂家直接安装精确就成了,手动狗头。
光电编码器与旋变对位置原理基本一致,不过光电编码器这一类非绝对式的每次对完位置保存好偏差角度。当编码器重新上下电后,其0角度是丢失的。为了获得z信号脉冲,重新获得0角度,可能会出现启动不顺滑,失控等不确定情况。



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











