









本文主要详细分析 P I D PID PID控制器各个环节的作用以及参数整定的一般方法。
P I D PID PID控制器各环节的作用:
P P P:误差的比例项(现在),比例项的引入,时域上来讲可以增加了系统的开环增益和自然频率,使控制系统的稳态误差降低,阻尼比减小,响应速度加快,超调量增加,震荡加剧;频域上来讲可以使系统的幅值响应曲线整体上移,低频段的幅值增加使稳态误差降低,幅值穿越频率增加,闭环带宽增加(快速性变好),相角裕度减小(比例项不影响相频特性曲线)使得阻尼比降低,超调量增加;
I I I:误差的积分项(过去);积分项的引入,时域上来讲可以使系统的型别增加,稳态误差减小,可能降低系统稳定性;频域上来讲可以使系统幅值响应曲线斜率减小了 20 d B / 十 倍 频 程 20dB/十倍频程 20dB/十倍频程,低频段变陡,使得系统的稳态误差降低,系统的幅值穿越频率减小,闭环带宽减小(快速性变差),高频段的幅值衰减能有效抑制高频噪声。
D D D:误差的微分项(将来);微分项的引入,时域上来讲增加了系统的阻尼比改善了系统的快速性和动态平稳性;频域上来讲使系统幅值响应曲线斜率增加了 20 d B / 十 倍 频 程 20dB/十倍频程 20dB/十倍频程,系统的幅值穿越频率增加,闭环带宽增加(快速性变好),相角超前改善了系统的相角响应曲线,但高频段的幅值增加放大了高频噪声,对系统性能不利。
P I D PID PID控制方式的选取:
P P P
适用于控制通道滞后较小,时间常数不太大,扰动幅度较小,负荷变化不大,控制质量要求不高,允许有稳态误差的场合。如贮罐液位控制和不太重要的蒸汽压力的控制等。
P I PI PI
P I PI PI控制器的传递函数描述如下:
G c ( s ) = K p ( 1 + 1 T i S ) G_{c}(s)=K_{p}\left(1+\frac{1}{T_{i} S}\right) Gc(s)=Kp(1+TiS1)
其伯德图如下:
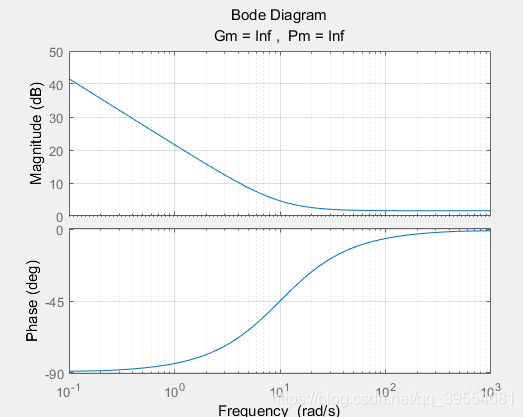
P I PI PI控制器是一种滞后校正装置,具有一个位于 s = − 1 / T s s=-1/T_s s=−1/Ts的零点和位于 s = 0 s=0 s=0的极点,因此 P I PI PI控制器特点是在零频率处有无穷大增益,这改善了系统的稳态特性,但是引入积分会使系统型别增加,从而使被校正系统的稳定性降低,甚至失稳;必须适当地选取 K p K_p Kp和 T s T_s Ts的值,使得系统有合适的瞬态响应;值得注意的是, P I PI PI控制器有时可使系统对阶跃输入的响应呈现相当小的超调量,但此时其响应速度很低,这是因为具有低通特性的 P I PI PI控制器对系统的高频分量进行衰减,使得系统的动态性能变差;引入积分作用能减小或消除稳态误差。适用于控制通道滞后小,负荷变化不太大,工艺上不允许有稳态误差的场合,如流量或压力的控制。
PD
PD控制器的传递函数描述如下:
G c ( s ) = K p ( 1 + T d s ) G_{c}(s)=K_{p}\left(1+T_{d} s\right) Gc(s)=Kp(1+Tds)
其伯德图如下:
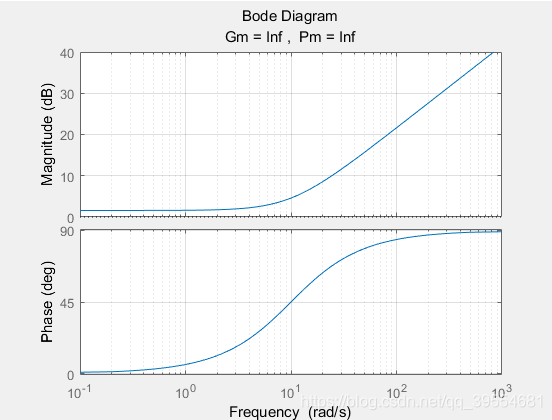
P D PD PD可以看作是简化版的超前校正, K p K_p Kp以满足系统稳态误差条件为依据来选取,转角频率 1 / T d 1/T_d 1/Td应选择在使相位超前发生在增益交界频率附近;但是当频率大于转角频率时,虽然相角裕度可以增加但是校正装置的幅值也将持续增加( P D PD PD控制器可看作高通滤波器),在高频段的幅值增加是不利于系统稳定的,因为它放大了可能存在于系统内部的高频噪声。超前校正可以提供充分的相位超前,但是它在高频段的幅值增加比 P D PD PD小得多,因此,超前校正优于 P D PD PD;由于引入了微分,会有超前控制作用,能使系统的稳定性增加,加快了控制过程,改善了控制质量。适用于时间滞后较大的场合,如加热炉控制。对于滞后很小和扰动作用频繁的系统,应尽可能避免使用微分作用。如同超前校正的作用一样, P D PD PD控制器可以改善系统瞬态响应性能,增加系统的稳定性,增加系统的带宽(快速性提高,动态性能变好)。
P I D PID PID
P I D PID PID控制器是 P I − P D PI-PD PI−PD控制的组合,是一种超前-滞后校正装置, P I − P D PI-PD PI−PD的作用发生在不同频段, P I PI PI控制作用发生在低频段(稳态特性), P D PD PD控制作用发生在高频段(动态特性),当系统既需要改善动态特性又需要改善稳态特性时,使用 P I D PID PID控制器。
可以使系统获得较高的控制质量,它适用于容量滞后大、负荷变化大、控制质量要求较高的场合,如反应器、聚合釜的温度控制和无人机位置姿态控制等。
P I D PID PID控制器的参数整定
当对象的传递函数模型确定时,可以采用解析或者计算的方法得出满足性能要求的PID参数的值,但是当对象模型复杂时,解析和计算的方法不能用,这时候便要适用基于实验的方法来调节PID的参数。
试凑
我们可以根据P、I、D三个环节对系统性能的不同影响来针对性地改变某一环节的值,通过反复不断的调整,最终可以得到一组比较满意的值。
齐格勒-尼柯尔斯方法
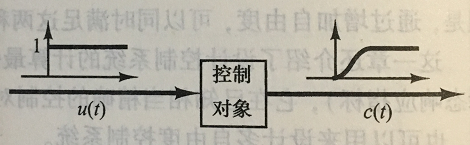
第一法
假设系统的传递函数模型可以等效为具有传递延迟的一阶系统,可以通过实验的方法实测出其单位阶跃响应的曲线。
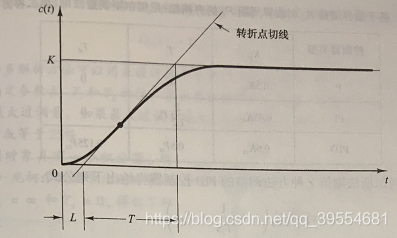
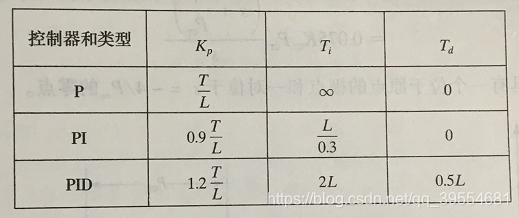
由齐格勒-尼科尔斯第一法确定的PID控制器如下:
G
c
(
s
)
=
K
p
(
1
+
1
T
i
s
+
T
d
s
)
=
1.2
T
L
(
1
+
1
2
L
s
+
0.5
L
s
)
=
0.6
T
(
s
+
1
L
)
2
s
\begin{aligned} G_{c}(s) &=K_{p}\left(1+\frac{1}{T_{i} s}+T_{d} s\right) \\ &=1.2 \frac{T}{L}\left(1+\frac{1}{2 L s}+0.5 L s\right) \\ &=0.6 T \frac{\left(s+\frac{1}{L}\right)^{2}}{s} \end{aligned}
Gc(s)=Kp(1+Tis1+Tds)=1.2LT(1+2Ls1+0.5Ls)=0.6Ts(s+L1)2
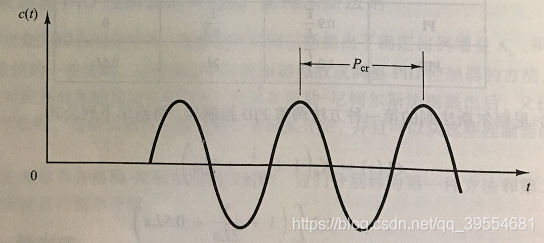
第二法
假设系统的传递函数模型可以等效为具有一对主导复极点的二阶系统,对系统只采用比例控制器进行闭环控制,使 K p K_p Kp从0增加到临界值 K c r K_{cr} Kcr( K c r K_{cr} Kcr为使系统输出首次呈现等幅振荡时的增益值),测得振荡周期为 P c r P_{cr} Pcr;
则系统的 P I D PID PID控制器参数可由下式确定:

由齐格勒-尼科尔斯第二法确定的PID控制器如下:
G c ( s ) = K p ( 1 + 1 T i s + T d s ) = 0.6 K c r ( 1 + 1 0.5 P c r s + 0.125 P c r s ) = 0.075 K c r P c r ( s + 4 P c r ) 2 s \begin{aligned} G_{c}(s) &=K_{p}\left(1+\frac{1}{T_{i} s}+T_{d} s\right) \\ &=0.6 K_{\mathrm{cr}}\left(1+\frac{1}{0.5 P_{\mathrm{cr}} s}+0.125 P_{\mathrm{cr}} s\right) \\ &=0.075 K_{\mathrm{cr}} P_{\mathrm{cr}} \frac{\left(s+\frac{4}{P_{\mathrm{cr}}}\right)^{2}}{s} \end{aligned} Gc(s)=Kp(1+Tis1+Tds)=0.6Kcr(1+0.5Pcrs1+0.125Pcrs)=0.075KcrPcrs(s+Pcr4)2
实际上,齐格勒-尼科尔斯方法给出的使参数值的一种合理的估算,并且提供了一组可以进行精细调参的起点数据,而不是一次性给出了最优参数。

















 9780
9780

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









