







机器人视觉系统主要包括光源、镜头、相机、信息处理器、视觉算法软件这些部分。
物体反射光源光线,通过镜头在相机中成像,通过图像处理算法处理得到需要的信息,再将其传送到执行单元对机器人进行运动控制。
光源:使得物体的特征可见,同时抑制物体不需要的特征。对于每种不同的检测对象,必须采用不同的照明方式才能突出被检测对象的特征,有时可能需要采取几种方式的结合。
镜头:镜头属于光学部分,用于控制成像光线,也决定了成像的大部分属性。其主要参数如下:
焦距:从镜头的中心点到焦平面上所形成的清晰影像之间的距离。焦距的大小决定着视角的大小。

由上图可知,焦距越小,视角越大。所以广角镜头、鱼眼镜头等都是短焦镜头。
光圈:代表头光量。用F表示,以镜头焦距f和通光孔径D的比值来衡量,控制进入相机的光量。光圈越大,越清晰越饱满。
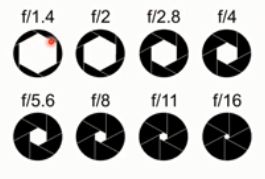
景深:被拍物体聚焦清楚后,在物体前后一定距离内,其影像依然清晰的范围。焦距越短、光圈越小,景深越大。短焦镜头往往很难拍出虚化效果,意味着景深较大。

视场:视场是指通过相机镜头所摄取到的景物范围;视(角)场:从相机后结点到画幅边缘所形成的夹角。
镜头:按照焦距的长短和所拍摄画面影响的特点,可将镜头分为标准镜头、广角镜头、鱼眼镜头、长焦镜头和变焦镜头等。
标准镜头:视角50°左右,焦距50mm左右。成效效果与人眼(60°左右)类似,画面贴切自然。
广角镜头:视角大(70°以上),焦距偏小(30mm)以内,景深大,畸变大。
鱼眼镜头:视角180°左右,焦距16mm以下,属于极端的超广角镜头,一般用于天文观测,可以把半球天空进行观测。
长焦镜头:又称远射镜头,视角12°以下,焦距200mm以上。景深小,视角小,畸变小,事宜人像、远距拍摄。
图像传感器:
作用:将通过镜头投影到传感器的图像传送到能够存储、分析和显示的机器设备上。
分类:按照传感器类型可以分为CCD相机(模拟,处理速度慢,效果好)、CMOS相机(数字)。
图像传感器是视觉成效技术的关键部件,会影响到目标成像质量和后续的图像处理效果。好的图像传感器可以生成清晰、噪声少、动态范围高的图像。

参考文献
1.机器人学. 华中科技大学.















 2687
2687











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









