







机器人地盘开发除了SLAM这个重要得点,另一个就是Navigation自主避障导航了。在学习机器人开发时,会遇到很多不懂得地方,特别是算法方面,这让没有数学功底得同学学起来非常困难。因此相关得算法也是要去学习一二啦,至少知道是怎么回事,那样学习起来才会知其所以然,越学越有意思,还可以自己做机器人,多好!好啦,开始我的学习之旅。
机器人Navigation 让机器人学会自己正确的行走。
学习要点:
1.理解官方Navigation结构框图: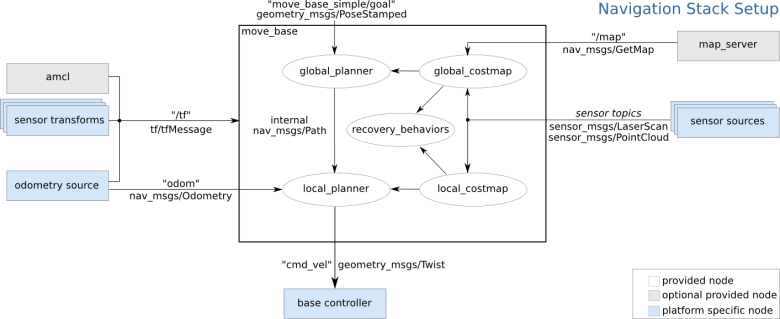
从框图就可以清晰的看出navigation模块需要哪些输入哪些输出,以及哪些插件。
2.学习tf树及Map、Odom、Base之间的转换关系。
3.学习Unified Robot Description Format,及统一机器人描述格式,简称为URDF,使用ROS强大的机器人功能,建立ROS可以识别的机器人模型是第一步,也是无法绕过去的环节。
4.地图加载包:map_server 和gmapping(激光雷达或深度数据获取的地图)。
5.move_base :根据参照的消息进行路径规划,使移动机器人到达指定的位置。
6.amcl :自适应蒙特卡洛定位方
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 886
886











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









