







 本文提供了一步一步的教程,教你如何使用STM32和树莓派搭建一艘能自主巡航的无人船。内容涵盖了材料准备、模块连线、程序烧录与调试等关键步骤,特别强调了电机类型、GPS模块选择及遥控器配置等注意事项。
本文提供了一步一步的教程,教你如何使用STM32和树莓派搭建一艘能自主巡航的无人船。内容涵盖了材料准备、模块连线、程序烧录与调试等关键步骤,特别强调了电机类型、GPS模块选择及遥控器配置等注意事项。
过去笔者写了几篇关于无人船偏理论的文章,但不少志同道合的友人在实际搭建无人船的时候遇到了一些小问题。这里我把纯动手的部分集中写在这里,让搭建无人船的过程像Arduino一样集成化、便捷。
请注意,本文为作者本人从知乎平台上搬运过来的,可能更新进度没有知乎上快,还请谅解。
我的知乎地址:电波少年:专注无人船、人工智能的开发与实践
首先是理论篇的姊妹文章,想要深层次了解无人船的工作原理,还请参考以下:
此外,如果你只是需要一个无人船平台,也可以不去看上面的文章,直接按照本文内容上手实践哦
下面就来一起搭建无人船吧!
一:材料准备
-
STM32F103ZET6:下位机,控制船体运动
-
树莓派,型号任意:上位机,负责高级算法实现
-
MPU6050:IMU惯性测量模块
-
GPS,型号M8N(带磁罗盘的一款):国产或进口版本,本项目均支持
-
飞控的遥控器,型号任意,最好是有7-8个通道的;要带接收机(例如:天地飞WTF-07)
-
纳雷SP70C毫米波雷达:避障用,待后续拓展。(无人船避障模块已开发完毕,但不建议一开始就做避障)
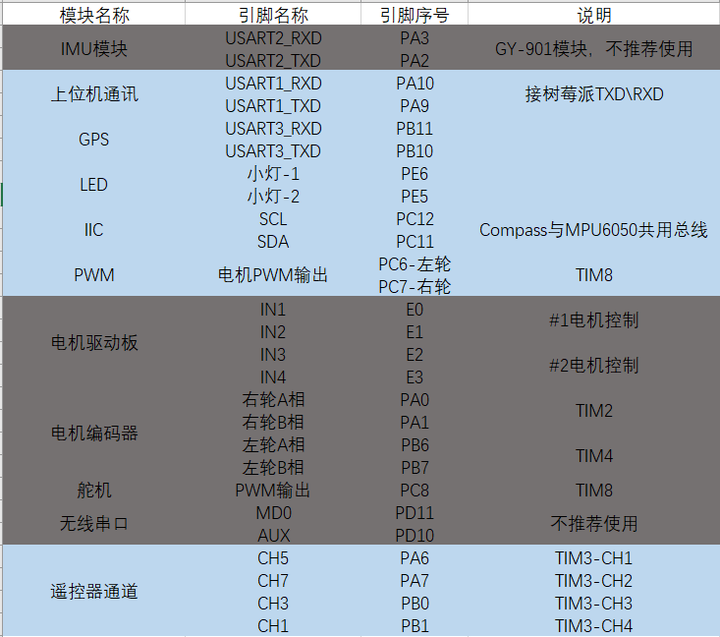
二:各模块连线
图中的“IMU模块”、“无线串口”都不建议使用。直接忽视即可。
第一个要注意的点:
由于有的船使用的是普通电机,有的船使用的是电调+无刷电机,因此关于电机我们有两种连线方案,代码也相应的有两种,请按照你的实际需要选择:
-
有刷电机
-
如果你使用的是普通电机,那么请注意,由于要防止两电机转速不同导致的船无法走直线
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2062
2062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









