







ROS2作为常用的机器人开源系统,常常被部署到各种平台,本博客以树莓派4B为平台,Ubuntu22.04为系统,ROS2版本为humble。ROS2配置见前一篇博客:
Ubuntu22.04配置ROS2(2024最新)-CSDN博客
1.线路连接
无人船一般使用无刷电机,无刷电机一般有三根线,分别是正极、负极和信号线,需要用pwm信号来驱动,接线时,将电机的信号线与树莓派的PWM引脚相连,树莓派的PWM引脚分为硬件接口和软件接口,软件接口的使用很容易出现问题,因此我们使用硬件接口,即GPIO12,GPIO13,GPIO18和GPIO19,
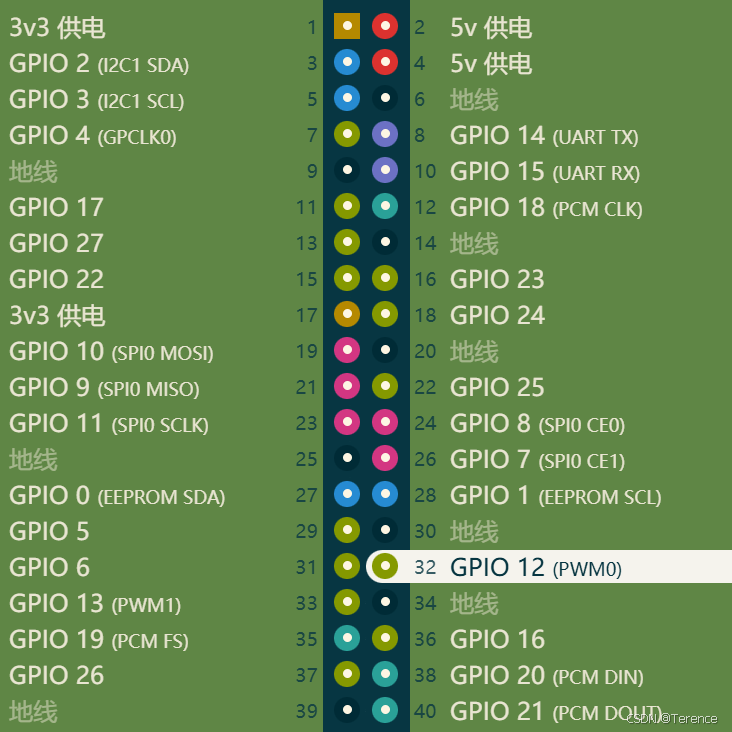
引脚图如上,可对应树莓派4B进行参照。
2.pigpio库下载
树莓派官方有专门的库来产生PWM信号,但存在着一定延迟,因此我们采用第三方库pigpio。
如果直接下载pigpio会显示找不到库,因为我们通过github链接进行下载:
在命令行依次输入以下指令:
wget https://github.com/joan2937/pigpio/archive/master.zip
unzip master.zip然后定位到安装的文件夹,并进行编译:
cd pigpio-master
make之后进行安装:
sudo apt install python-setuptools python3-setuptools
sudo make install
sudo pigpiod注意使用该库需要输入sudo pigpiod,否则会没有权限。
3.代码编写
mport rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
from std_msgs.msg import Int32MultiArray
import pigpio
import time
class MotorController(Node):
def __init__(self, name):
super().__init__(name)
self.sub_cmd_vel = self.create_subscription(Twist, '/cmd_vel', self.cmd_vel_callback, 10)
self.pub_pwm = self.create_publisher(Int32MultiArray, '/motor_pwm', 10)
# 初始化pigpio
self.pi = pigpio.pi()
if not self.pi.connected:
raise RuntimeError("pigpio not connected!")
self.motor1_pwm_pin = 13 # 硬件PWM GPIO12 (BCM编码)
self.motor2_pwm_pin = 12 # 硬件PWM GPIO13 (BCM编码)
# PWM参数
self.pwm_center = 1500
self.pwm_forward = 1750
self.pwm_reverse = 1250
self.pwm_stop = self.pwm_center
# 确保PWM频率设置为50Hz
self.pi.set_PWM_frequency(self.motor1_pwm_pin, 50)
self.pi.set_PWM_frequency(self.motor2_pwm_pin, 50)
self.pi.set_servo_pulsewidth(self.motor1_pwm_pin, 1500)
self.pi.set_servo_pulsewidth(self.motor2_pwm_pin, 1500)
time.sleep(3)
def set_pwm(self, motor1_pwm_value, motor2_pwm_value):
# 设置电机的PWM值,转化为硬件PWM接口的百分比占空比
self.pi.set_servo_pulsewidth(self.motor1_pwm_pin, motor1_pwm_value)
self.pi.set_servo_pulsewidth(self.motor2_pwm_pin, motor2_pwm_value)
# 发布PWM信号
pwm_msg = Int32MultiArray()
pwm_msg.data = [motor1_pwm_value, motor2_pwm_value]
self.pub_pwm.publish(pwm_msg)
def cmd_vel_callback(self, msg):
linear = msg.linear.x
angular = msg.angular.z
if linear == 0.0:
if angular > 0.0:
# 左转
self.set_pwm(self.pwm_reverse, self.pwm_reverse)
elif angular < 0.0:
# 右转
self.set_pwm(self.pwm_forward, self.pwm_forward)
else:
# 停止
self.set_pwm(self.pwm_stop, self.pwm_stop)
elif linear < 0.0:
self.set_pwm(self.pwm_reverse, self.pwm_forward)
else:
if angular == 0.0:
# 前进
self.set_pwm(1650,1350)
else:
# 前进时左转或右转,根据角速度实现
left_pwm = self.pwm_forward + angular * 100 # 简单计算,具体需要根据实际需求调整
right_pwm = self.pwm_forward - angular * 100
self.set_pwm(left_pwm, right_pwm)
def cleanup(self):
# 在程序停止时将电机PWM设置为1500
self.set_pwm(self.pwm_stop, self.pwm_stop)
self.pi.stop()
def main(args=None):
rclpy.init(args=args)
motor_controller = MotorController("motor_controller")
print("Motor Controller Node Started")
try:
rclpy.spin(motor_controller)
except KeyboardInterrupt:
pass
finally:
motor_controller.cleanup()
motor_controller.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
根据自身需要修改相关参数。

















 2372
2372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









