









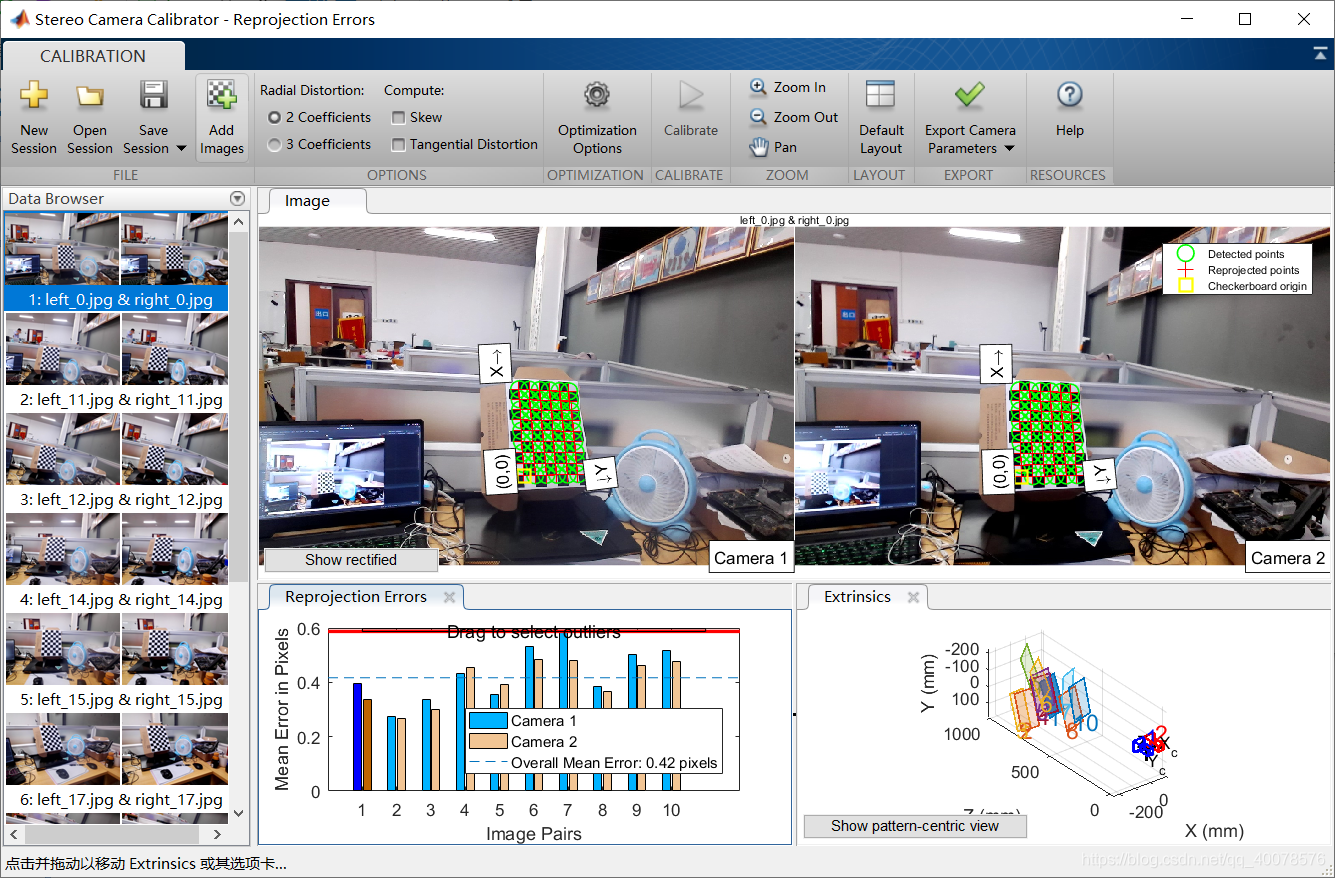
6月14,完成双目相机的标定,标定原理尚未清楚,尚未清楚,清楚
`/******************************/
/* 立体匹配和测距 */
/******************************/
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
string left_image_path = "../snapshot/left/left_0.jpg";
string right_image_path = "../snapshot/right/right_0.jpg";
Mat rgbImageL , grayImageL;
Mat rgbImageR , grayImageR;
Mat rectifyImageL , rectifyImageR;
Rect validROIL;//图像校正之后,会对图像进行裁剪,这里的validROI就是指裁剪之后的区域
Rect validROIR;
Mat mapLx, mapLy, mapRx, mapRy; //映射表
Mat Rl, Rr, Pl, Pr, Q; //校正旋转矩阵R,投影矩阵P 重投影矩阵Q
Mat xyz; //三维坐标
Point origin;
Rect selection;
bool selectionObject = false ;
int blockSize = 0 , uniquenessRation= 0, numDisparities = 0;
Ptr<StereoSGBM> sgbm = StereoSGBM::create(16,9);
Ptr<StereoBM> bm = StereoBM::create(16, 9);
/*
事先标定好的相机的参数
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraL_intrinsicMatrix = (Mat_<double>(3,3)<<885.945,0,686.472,
0, 872.664,381.1532,
0,0,1);
Mat cameraL_disCoeff = (Mat_<double>(5,1)<<0,0,0,0,0);//stortionCoeff
Mat cameraR_intrinsicMatrix = (Mat_<double>(3,3)<<885.945,0,686.472,
0, 872.664,381.1532,
0,0,1);
Mat cameraR_disCoeff = (Mat_<double>(5,1)<<0,0,0,0,0);
Mat T = (Mat_<double>(3, 1) << -68.9255, 0.8937, -4.8984);//T平移向量
Mat rec = (Mat_<double>(3, 1) << -0.00068, -0.0037, 0.0033);//rec旋转向量
Mat R = (Mat_<double>(3,3)<<1.000,-0.0037,-0.0068,
0.0037,1.000,0.0033,
0.0068,-0.0033,1.000);// 旋转矩阵
/*****立体匹配*****/
void stereo_match(int,void*)
{
sgbm->setBlockSize(2*blockSize+5); //SAD窗口大小,5~21之间为宜
sgbm->setPreFilterCap(31);
sgbm->setMinDisparity(0); //最小视差,默认值为0, 可以是负值,int型
sgbm->setNumDisparities(numDisparities*16+16);//视差窗口,即最大视差值与最小视差值之差,窗口大小必须是16的整数倍,int型
sgbm->setUniquenessRatio(uniquenessRation);//uniquenessRatio主要可以防止误匹配
sgbm->setSpeckleWindowSize(100);
sgbm->setSpeckleRange(32);
sgbm->setDisp12MaxDiff(-1);
Mat disp, disp8;
sgbm->compute(rectifyImageL, rectifyImageR, disp);//输入图像必须为灰度图
disp.convertTo(disp8, CV_8U, 255 / ((numDisparities * 16 + 16)*16.));//计算出的视差是CV_16S格式
reprojectImageTo3D(disp, xyz, Q, true); //在实际求距离时,ReprojectTo3D出来的X / W, Y / W, Z / W都要乘以16(也就是W除以16),才能得到正确的三维坐标信息。
xyz = xyz * 16;
imshow("disparity", disp8);
}
void stereo_match_BM(int,void*)
{
bm->setBlockSize(2*blockSize+5); //SAD窗口大小,5~21之间为宜
bm->setROI1(validROIL);
bm->setROI2(validROIR);
bm->setPreFilterCap(31);
bm->setMinDisparity(0); //最小视差,默认值为0, 可以是负值,int型
bm->setNumDisparities(numDisparities*16+16);//视差窗口,即最大视差值与最小视差值之差,窗口大小必须是16的整数倍,int型
bm->setTextureThreshold(10);
bm->setUniquenessRatio(uniquenessRation);//uniquenessRatio主要可以防止误匹配
bm->setSpeckleWindowSize(100);
bm->setSpeckleRange(32);
bm->setDisp12MaxDiff(-1);
Mat disp, disp8;
bm->compute(rectifyImageL, rectifyImageR, disp);//输入图像必须为灰度图
disp.convertTo(disp8, CV_8U, 255 / ((numDisparities * 16 + 16)*16.));//计算出的视差是CV_16S格式
reprojectImageTo3D(disp, xyz, Q, true); //在实际求距离时,ReprojectTo3D出来的X / W, Y / W, Z / W都要乘以16(也就是W除以16),才能得到正确的三维坐标信息。
xyz = xyz * 16;
imshow("disparity", disp8);
}
static void onMouse(int event, int x, int y, int,void*)
{
if(selectionObject)
{
selection.x=MIN(x,origin.x);
selection.y=MIN(y,origin.y);
selection.width = abs(x-origin.x);
selection.height = abs(y-origin.y);
}
switch (event)
{
case EVENT_LBUTTONDOWN:
origin = Point(x,y);
selection = Rect(x,y,0,0);
selectionObject = true;
cout << origin <<"in world coordinate is: " << xyz.at<Vec3f>(origin) << endl;
break;
case EVENT_LBUTTONUP: //鼠标左按钮释放的事件 selectionObject = false;
if (selection.width > 0 && selection.height > 0)
break;
}
}
int main()
{
rgbImageL=imread(left_image_path,-1);
grayImageL=imread(left_image_path,0);
rgbImageR=imread(right_image_path,-1);
grayImageR=imread(right_image_path,0);
Size imageSize = Size(rgbImageR.cols,rgbImageR.rows);
//Rodrigues(rec,R);
cout<<R<<endl;
#if 0
stereoRectify(cameraL_intrinsicMatrix, cameraL_disCoeff, cameraR_intrinsicMatrix, cameraR_disCoeff, imageSize, R, T, Rl, Rr, Pl, Pr, Q, CALIB_ZERO_DISPARITY,
0, imageSize, &validROIL, &validROIR);
initUndistortRectifyMap(cameraL_intrinsicMatrix, cameraL_disCoeff, Rl, Pr, imageSize, CV_32FC1, mapLx, mapLy);
initUndistortRectifyMap(cameraR_intrinsicMatrix, cameraR_disCoeff, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
#else
stereoRectify(cameraL_intrinsicMatrix, cameraL_disCoeff, cameraR_intrinsicMatrix, cameraL_disCoeff, imageSize, R, T, Rl, Rr, Pl, Pr, Q, CALIB_ZERO_DISPARITY,
0, imageSize, &validROIL, &validROIR);
initUndistortRectifyMap(cameraL_intrinsicMatrix, cameraL_disCoeff, Rl, Pr, imageSize, CV_32FC1, mapLx, mapLy);
initUndistortRectifyMap(cameraR_intrinsicMatrix, cameraL_disCoeff, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
#endif
// cout<<mapLy<<mapRy<<endl;
remap(grayImageL,rectifyImageL,mapLx,mapLy,INTER_LINEAR);
remap(grayImageR,rectifyImageR,mapRx,mapRy,INTER_LINEAR);
imshow("rectified ",rectifyImageL);
imshow("rectified ",rectifyImageR);
Mat canvas;
double sf;
int w,h;
sf = 800./MAX(imageSize.height,imageSize.width);
w = cvRound(imageSize.width*sf);
h = cvRound(imageSize.height*sf);
canvas.create(h,w*2,CV_8UC3);
Mat canvasPart = canvas(Rect(w*0,0,w,h));
resize(rectifyImageR,canvasPart,canvasPart.size(),0,0,INTER_LINEAR);
Rect vrioR(cvRound(validROIR.x*sf),cvRound(validROIR.y*sf),
cvRound(validROIR.width*sf),cvRound(validROIR.height*sf));
cout<<"painted ImageR"<<endl;
for (int i = 0; i <canvas.rows ; i+=16)
{
line(canvas,Point(0,i),Point(canvas.cols,i),Scalar(0,255,0),1,8);
}
imshow("rectified",canvas);
namedWindow("disparity",WINDOW_FULLSCREEN);
createTrackbar("BlockSize:\n", "disparity",&blockSize, 8, stereo_match);
createTrackbar("uniquenessRation:\n", "disparity",&uniquenessRation, 50, stereo_match);
createTrackbar("numDisparities:\n", "disparity",&numDisparities, 16, stereo_match);
// createTrackbar("uniquenessRation:","disparity:",&uniquenessRation,50,stereo_match);
// createTrackbar("numDisparities:","disparity:",&numDisparities,16,stereo_match);
setMouseCallback("disparity",onMouse,0);
stereo_match(0,0);
waitKey();
return 0;
}
慢慢调














 2459
2459











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









