







1 ndarray
相比于python中的list,ndarray的核心优势就是运算快
Numpy 喜欢用电脑内存中连续的一块物理地址存储数据
Python 的 List 并不是连续存储的,它的数据是分散在不同的物理空间(list中的类型可以是不一样的)
1.1 创建
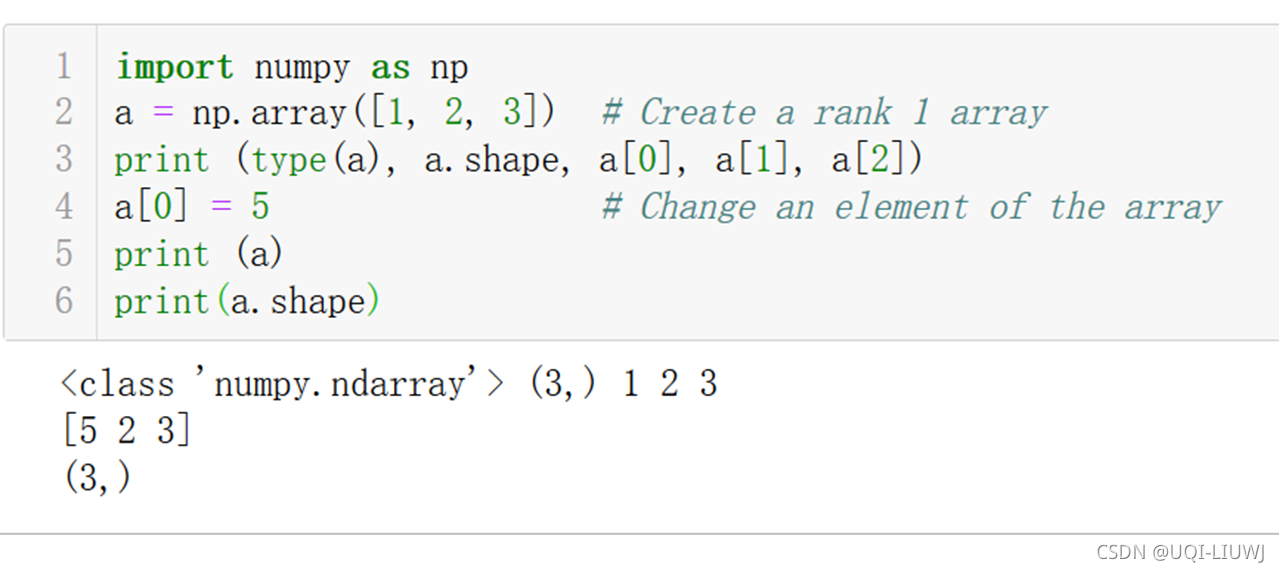
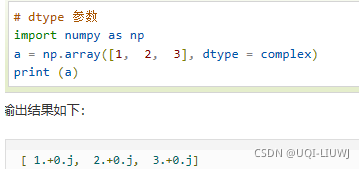
np.array(object,dtype=…) | 用object创建ndarray
| ||||||
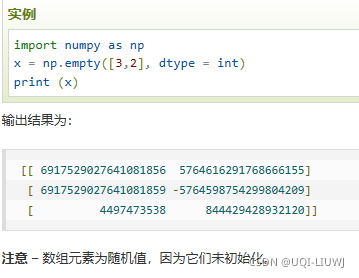
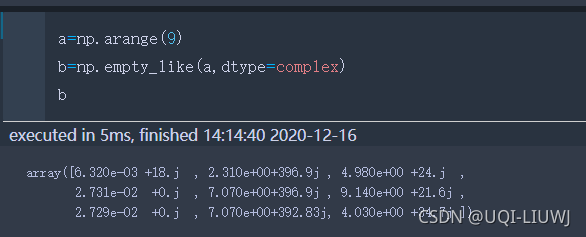
empty(shape,dtype=)empty_like(data) | 指定形状&类型,元素值均为随机值
| ||||||
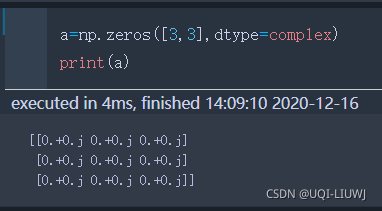
zeros(shape,dtype=)zeros_like(data) | 填充0
| ||||||
onesones_like(data) | 填充1
| ||||||
full(shape,num,dtype)full_like(data,num) | 用num填充shape大小的数组
| ||||||
eye(num,dtype)等同于identity(num,dtype) | num*num的单位矩阵
| ||||||
random.random(shape,dtype) |  | ||||||
numpy.random.normal(loc,scale,size) | 正态分布
| ||||||
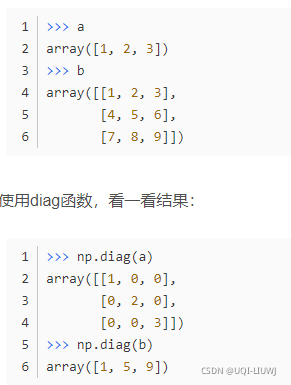
diag | 当 np.diag(array) 中 array是一个1维数组时,结果形成一个以一维数组为对角线元素的矩阵 array是一个二维矩阵时,结果输出矩阵的对角线元素
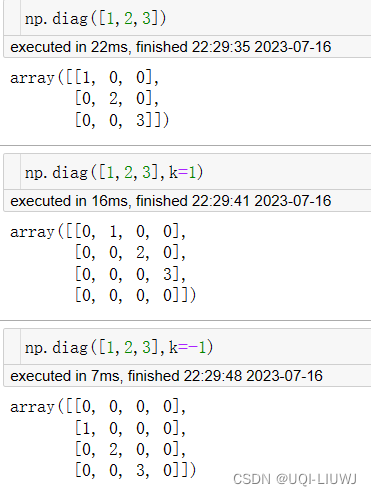
diag 函数在array后面还可以跟一个参数k,正值表示在对角线上方第几条对角线,负值表示在对角线下方第几条对角线
| ||||||
empty_like(x) | 创建一个形状和x一样的,数值随机
| ||||||
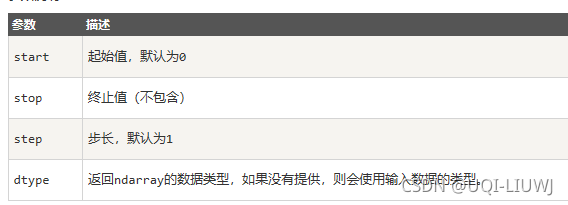
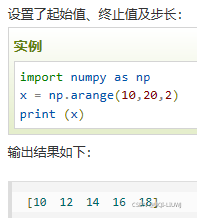
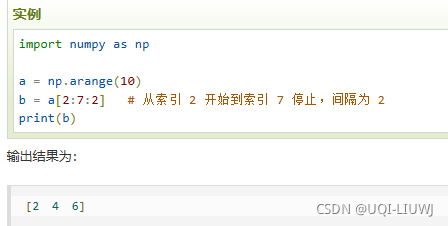
arange(start, stop, step, dtype) |
| ||||||
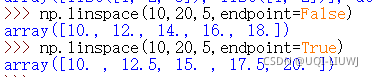
linspace | 创建一个等差数列
| ||||||
logspace | 创建一个等比数列
|






1.2 ndarray 属性
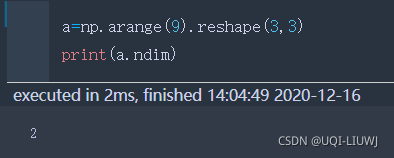
ndim | 矩阵维数 |
|
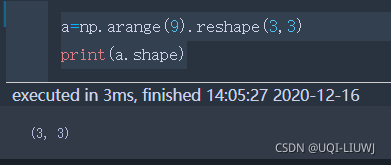
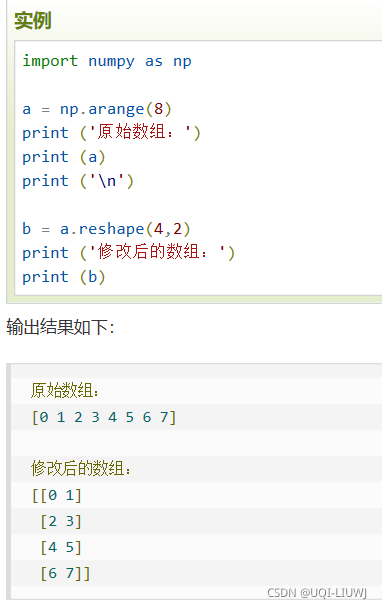
shape | 数组的维度(元组形式)【用reshape调整大小】 |
|
itemsize | 一个元素的大小(占几个字节) |
|
real | 元素的实部 |
|
imag | 元素的虚部 |
|
dtype | 数据类型 |
|
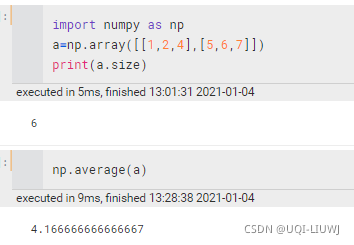
size | 元素个数 |
|
1.3 切片
| a[start:end:step] | 左闭右开
|
| a[…,x]——第x+1列 a[x,…]——第x+1行 | 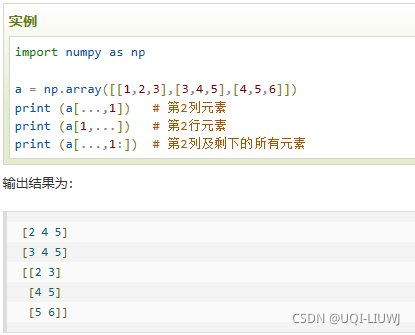 |
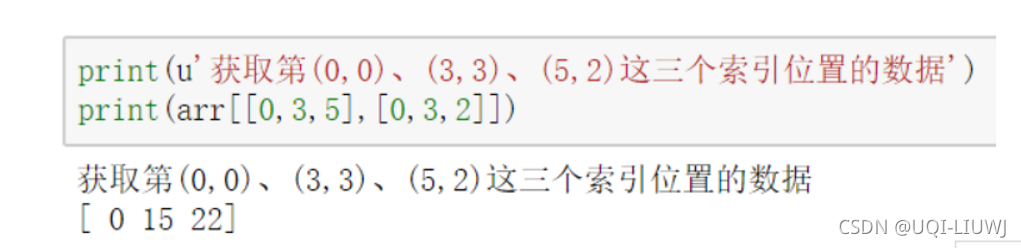
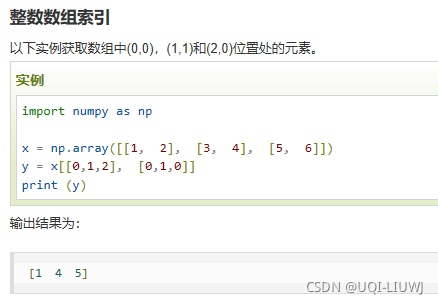
| a[[list1],[list2]] | 获取 (list1[0].list2[0]) (list1[1].list2[1]) (list1[2].list2[2]) ….等索引位置的数据
|
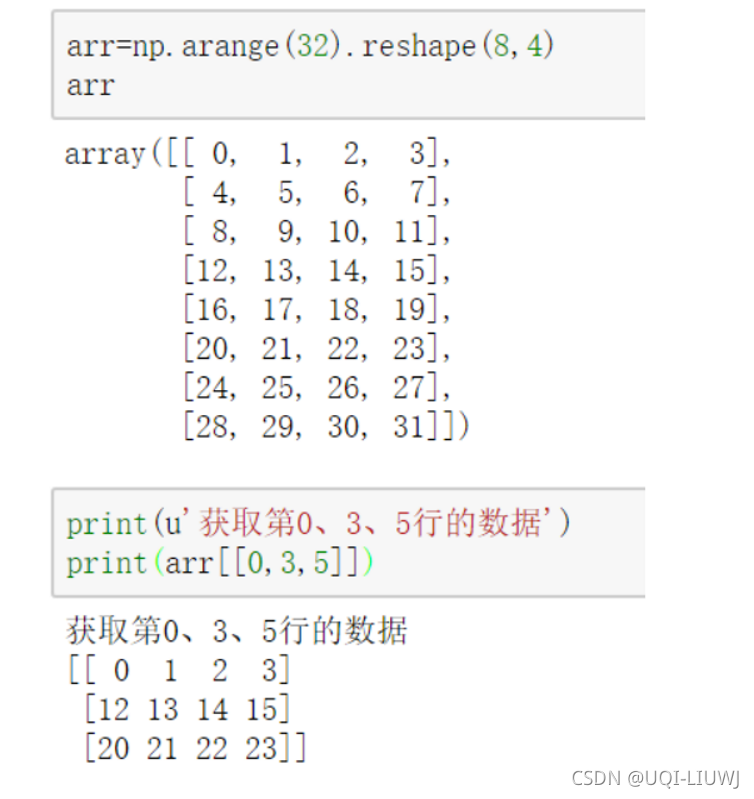
| a[list] | 获取list中这几行元素
|
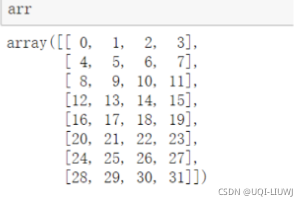
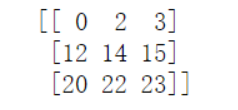
| a[np.ix_([list1],[list2])] |
获取第list1行的第list2列的数据
|
1.3.1 切片的性质
切片是原来的array的一个视图,修改切片的话,原来的也改变了
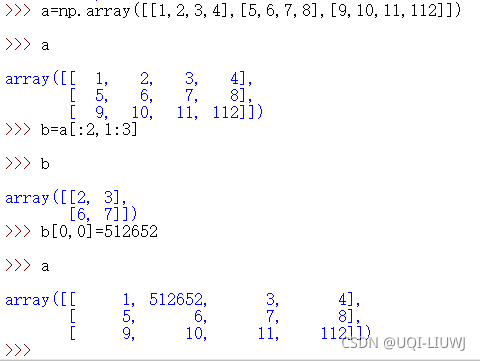
!!!记住结论:!!!
- 如果是数字/带数字的':'来切片的话,不论是不是有塌缩(类似于r1那样的变成一维的)都是原来的的一个view,元素修改了就一起修改了(a[0,:],a[0:1,:])
如果是数组这样的索引切片的话(注:元组tuple不行),那么就是copy不是view了(a[[0],:])
a[List]相当于np.array(a[x] for x in List)
如果是混合的(一个数组,一个纯数字),那么就是copy(因为有数组切片了)'
举一个不太严谨的比方,a[List,a:b]=np.array(a[x] for x in List)[:,a:b]。因为其中有copy的部分,所以就不是view
import numpy as np
a=np.array([[1,2,3],[3,4,5],[7,8,9]])
b=a[1,:]
c=a[[1],:]
d=a[1:2,:]
print(a,'\n',b,c,d)
'''
[[1 2 3]
[3 4 5]
[7 8 9]]
[3 4 5] [[3 4 5]] [[3 4 5]]
'''
b[1]=10
print(a,'\n',b,c,d)
'''
[[ 1 2 3]
[ 3 10 5]
[ 7 8 9]]
[ 3 10 5] [[3 4 5]] [[ 3 10 5]]
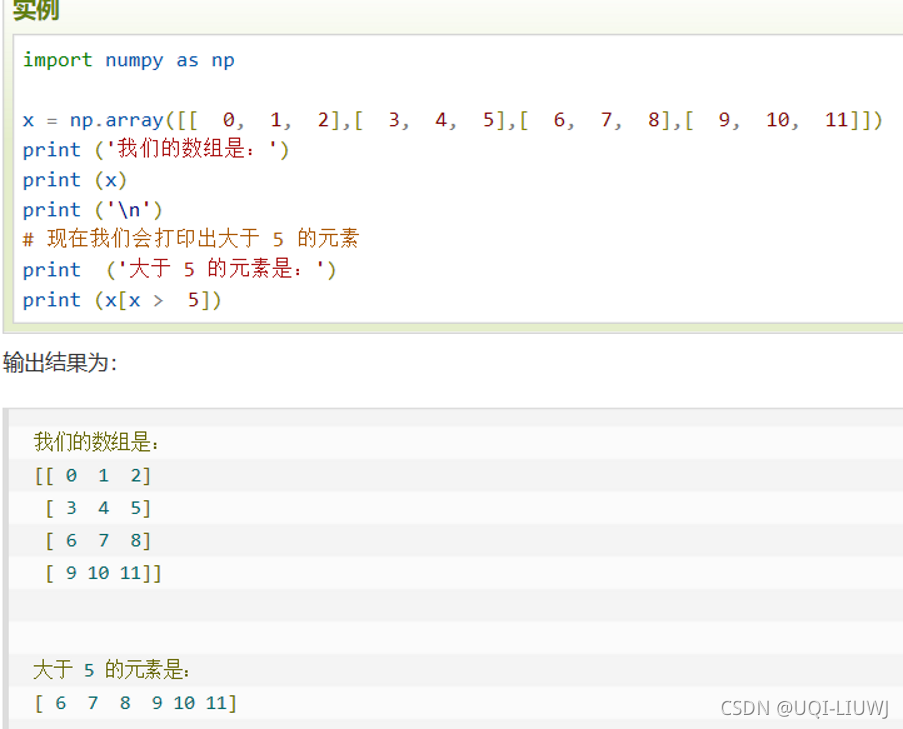
'''1.4 布尔索引
2 数组运算
执行数组的运算必须有相同的行列/符合广播规则
2.1 相同行列
相同行列:对应元素加减乘除
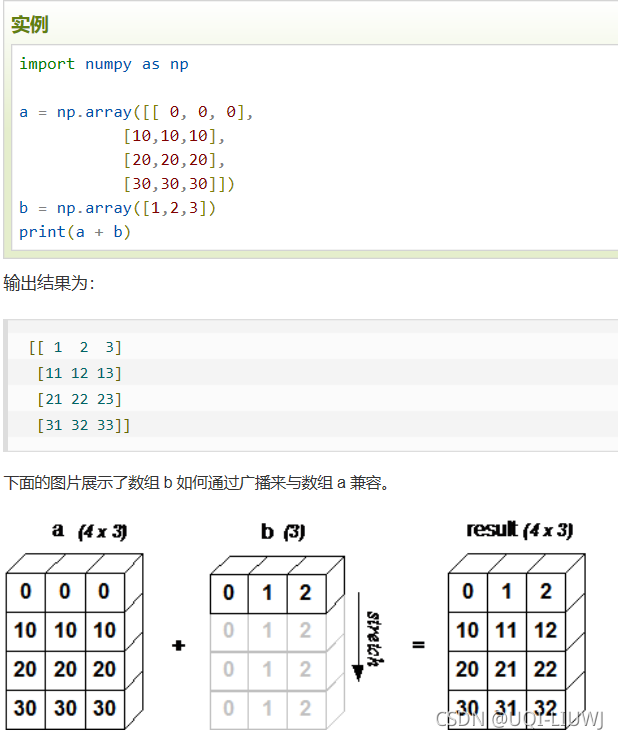
2.2 广播原则
当运算中的 2 个数组的形状不同时,numpy 将自动触发广播机制
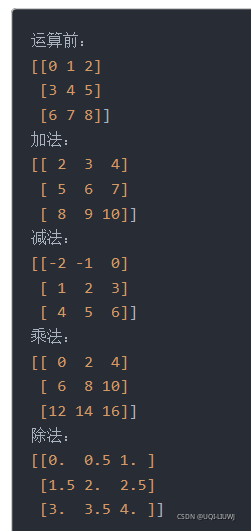
2.2.1 数组+标量
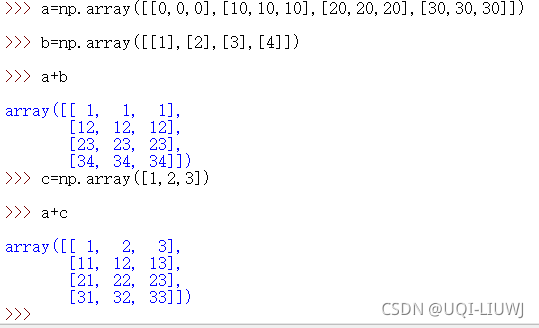
2.2.2 数组+行/列
3 内积外积与矩阵乘法
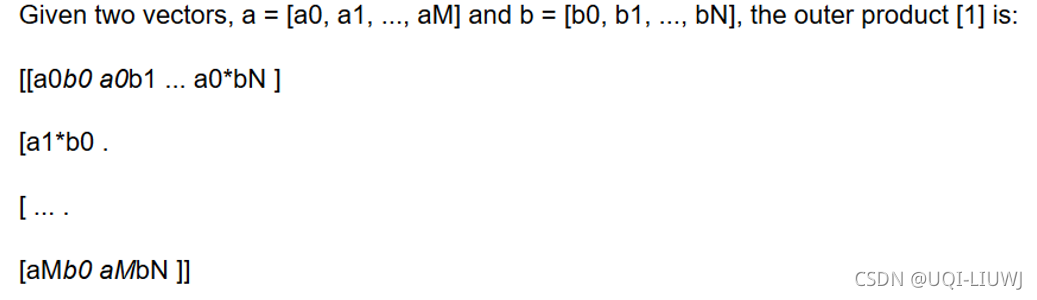
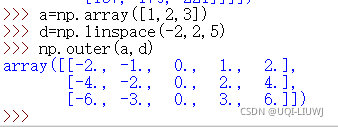
3.1 外积
3.2 内积
内积——inner/dot
np.dot(a,b)等价于a.dot(b)
inner用法和dot稍有不同: np.dot(a, b)= np.inner(a, b.T),相当于b做一次转置
3.3 乘法
matmul/@/dot
3.4 dot用法总结
-
对于np.dot(a,b,out=None)
-
如果a,b是一维数组,那么相当于两个向量的点积
-
如果a,b是二维数组(矩阵),那么就相当于a和b的矩阵乘法(等价于matmul,@)
-
如果a,b有一个是标量,那么就相当于逐元素乘I等价于multiply,*)
-
如果a是N维数组,b是M维数组,那么结果是沿着a的最后一个轴,和b的乘积和
-
3.5 叉乘
np.cross((0,0,1),(3,0,0)) #array([0, 3, 0])
4 函数
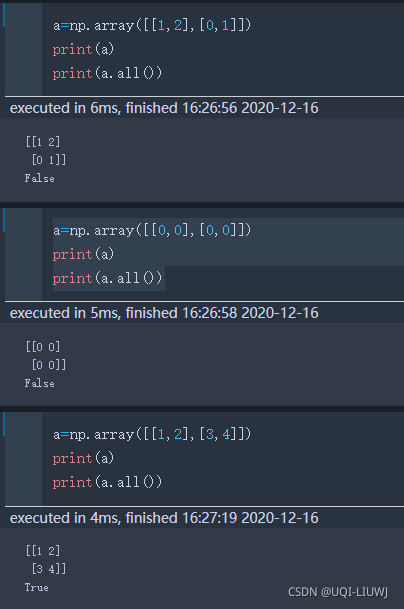
all | 矩阵中元素是否全部非零
| ||||||||||||||||||
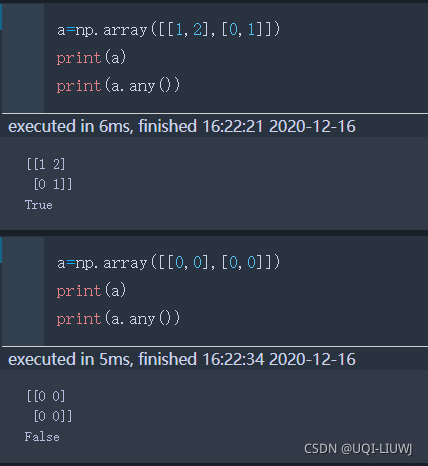
any | 矩阵中是否有元素非零
| ||||||||||||||||||
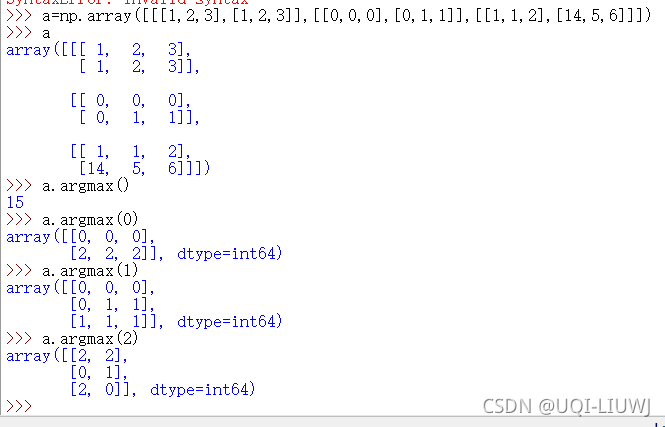
argmax/argmin | 第几维度的最大最小值的坐标
Argmax[0]:对每一个a[…][0][0],a[…][0][1],a[…][0][2] a[…][1][0],a[…][1][1],a[…][1][2]找一个最大值 | ||||||||||||||||||
nanargmax/nanargmin | 和argmax/argmin 类似,只是在这里,所有的nan都被排除掉了 | ||||||||||||||||||
count_nonzero() | 统计非零元素值
| ||||||||||||||||||
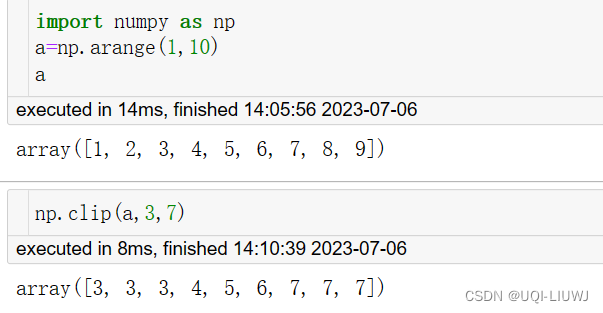
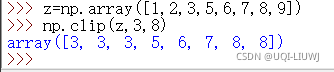
clip | clip(ndarray,a,b),比a小的赋值a,比b大的赋值b
| ||||||||||||||||||
floor | 向下取整
| ||||||||||||||||||
ceil | 向上取整
| ||||||||||||||||||
prod | 所有元素乘积结果
| ||||||||||||||||||
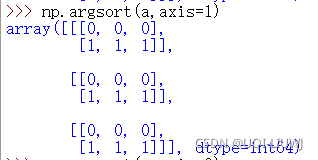
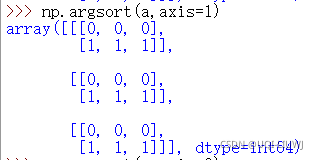
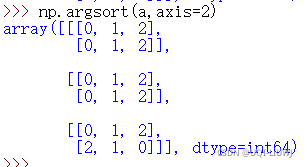
argsort | argsort函数返回的是数组值从小到大的索引值
b——正序 -b——倒序 如果是多维的话(默认是最大的一个axis) Axis=0 a[..][0][0],a[…][0][1],a[…][0][2] a[..][1][0],a[…][1][1],a[…][1][2]
Axis=1 a[0][…][0],a[0][…][1],a[0][…][2]
Axis=2同理
| ||||||||||||||||||
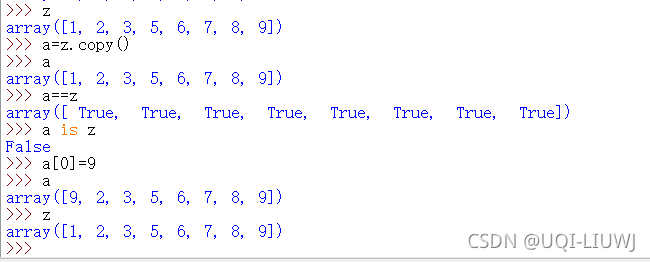
copy |
这个是真copy,不是view | ||||||||||||||||||
nanmaxnanminnanmeannanmediannanstdnanvar | 功能类似,只是这里不考虑nan | ||||||||||||||||||
clip | 截取数组中在min和max之间的部分,比min小的置为min,比max大的置为max
| ||||||||||||||||||
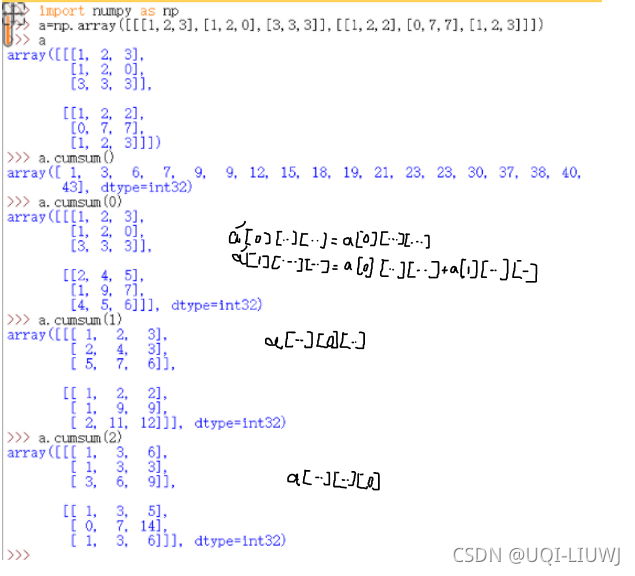
cumsum/cumprod | 括号是几——第几维度累加/累乘(a[][][][]里面的第几个,从左往右) 括号里是0:原第一行=原第一行 原第二行=原第二行+原第一行 原第三行=原第三行+原第二行+原第一行 括号里是1:列的操作 没有字母,所有元素,一个一个叠加
| ||||||||||||||||||
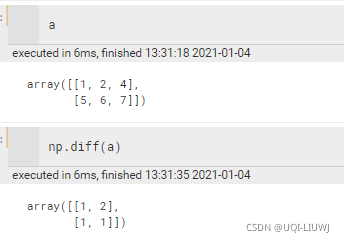
diff | 类差运算
| ||||||||||||||||||
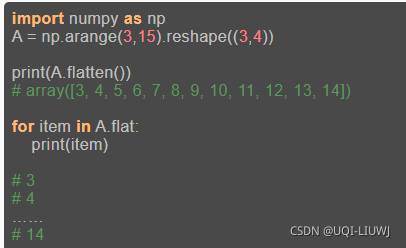
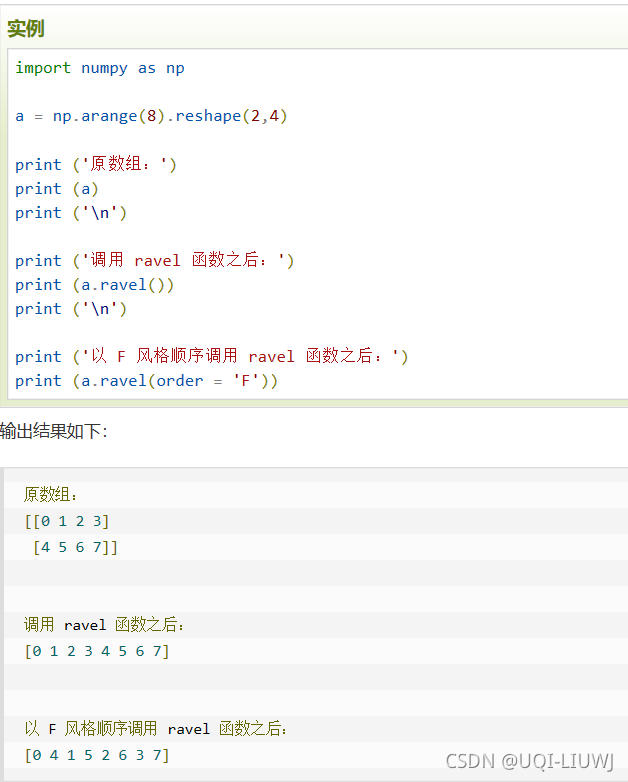
flatten | 返回一份数据拷贝,对拷贝所做的修改不影响原始数组
F风格:按列展开 flat 一个迭代器
| ||||||||||||||||||
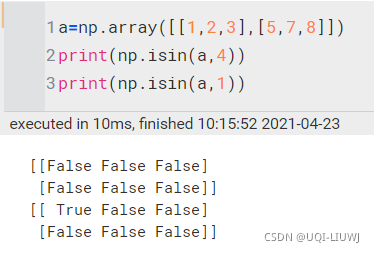
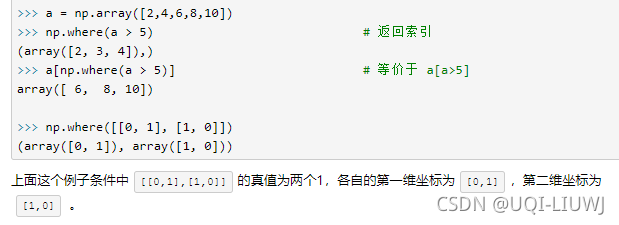
np.isin(a,b) | 用于判定a中的元素在b中是否出现过,如果出现过返回True,否则返回False,最终结果为一个形状和a一模一样的数组。
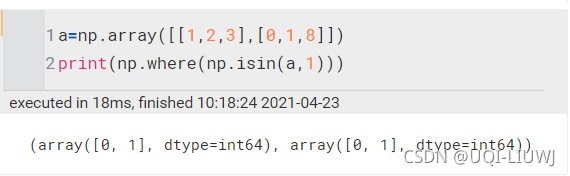
和np.where搭配使用,效果更好(np.where返回True的坐标)
分别是我找到的1的第一维坐标和第二位坐标 | ||||||||||||||||||
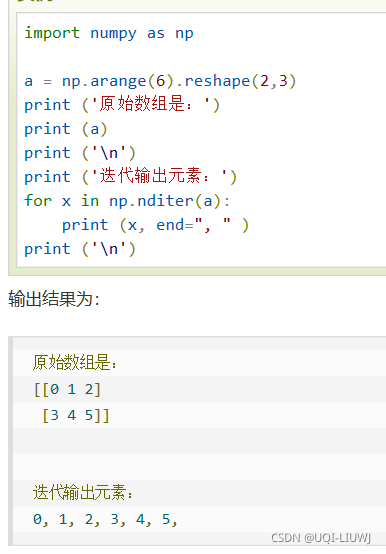
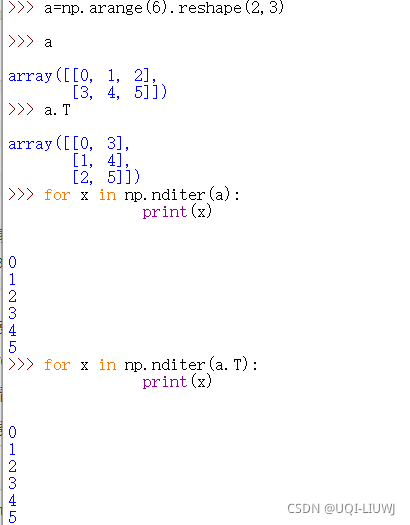
nditer | 按照ndarray在内存中的存储顺序逐个访问
a和a转置在内存中的存储顺序一样——他们的遍历顺序一样
默认order=’C‘行优先 ——order=“F’(fortran 列优先) | ||||||||||||||||||
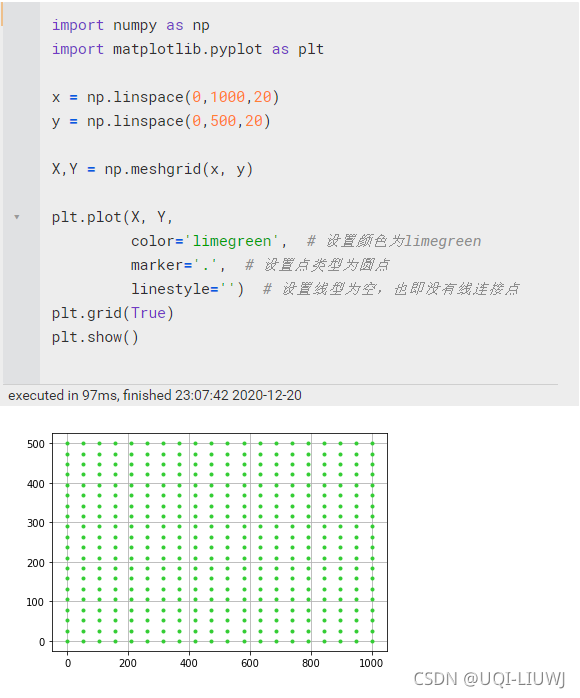
meshgrid(ndarray,ndarray) | 返回坐标方格的X与Y x和y都是二维数组,分别是这些点的横坐标/纵坐标
| ||||||||||||||||||
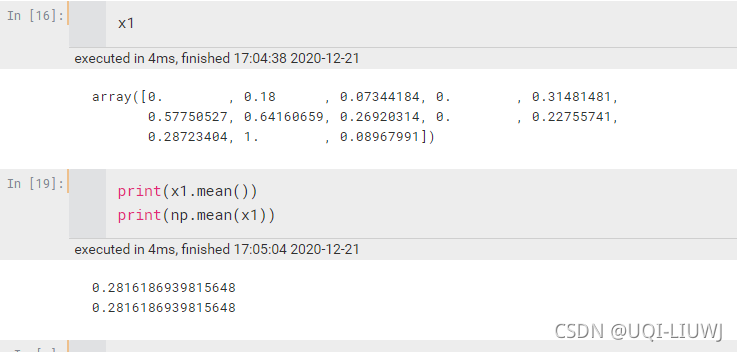
mean/average | 计算平均数,加axis就是某一个轴, 比如axis=0,就是每一列一个平均数(a[;;;][0],a[,,,,][1],…..,)
average只能是np.average
| ||||||||||||||||||
hypot | 输入为一个2*N的nadarray 输出N,为每一列元素作为直角边,斜边的长度
| ||||||||||||||||||
median | 中位数 | ||||||||||||||||||
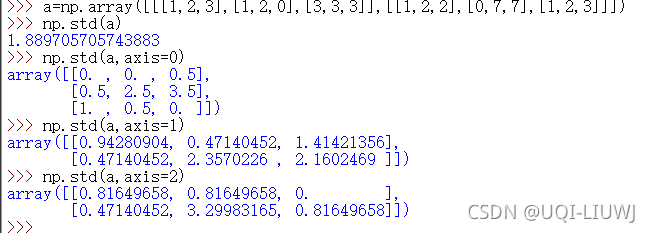
std | 标准差 | ||||||||||||||||||
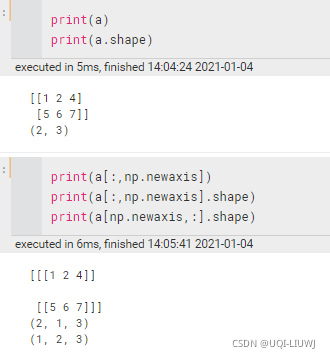
newaxis | 添加一个维度
感觉还是reshape靠谱一点 | ||||||||||||||||||
ravel | 和flatten差不多,唯一的区别是,修改会影响原始数组
| ||||||||||||||||||
reshape |
| ||||||||||||||||||
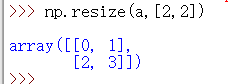
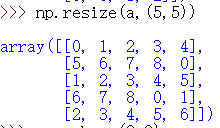
resize | 如果一样大的话和a.reshape()差不多 shape比a的尺寸小的话,那就是截取
如果尺寸大的话,会把a的元素按照a的顺序补进去
| ||||||||||||||||||
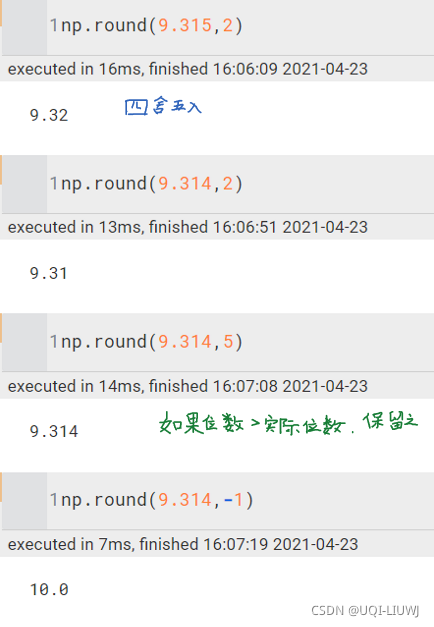
np.round | round( number ) 函数会返回浮点数 number 的四舍五入值 具体定义为 round(number[,digits]): 如果 digits>0 ,四舍五入到指定的小数位; 如果 digits=0 ,四舍五入到最接近的整数; 如果 digits<0 ,则在小数点左侧进行四舍五入; 如果 round() 函数只有 number 这个参数,则等同于 digits=0。
| ||||||||||||||||||
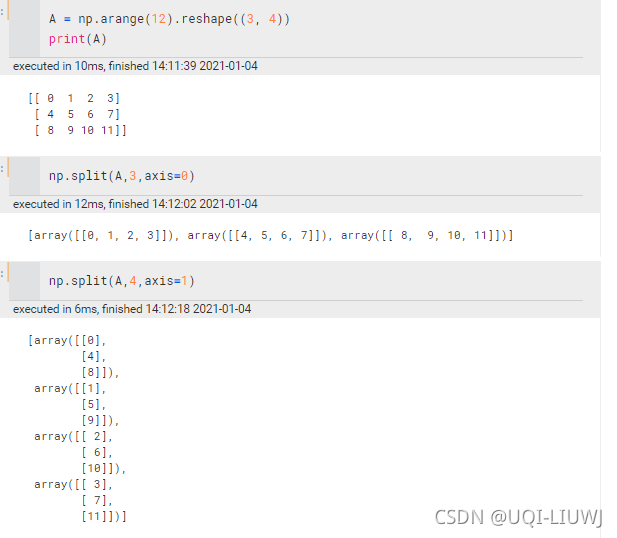
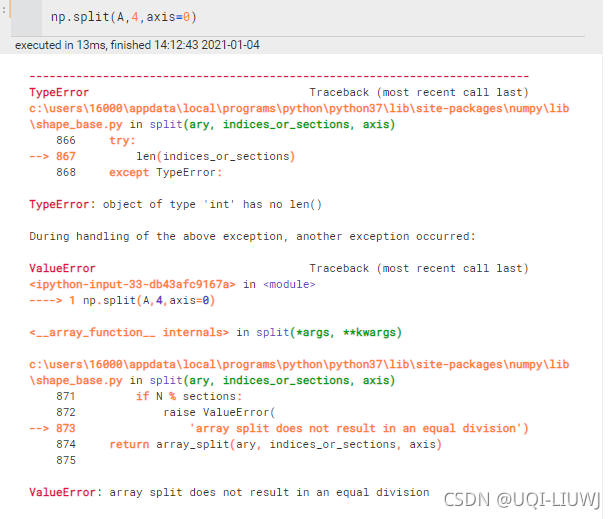
split | 等量对分 (axis=0 a[1~n][0]会被等分到各个里面去) 一定是等量,不等量的话会报错
vsplit=split(axis=0) hsplit=split(axis=1) | ||||||||||||||||||
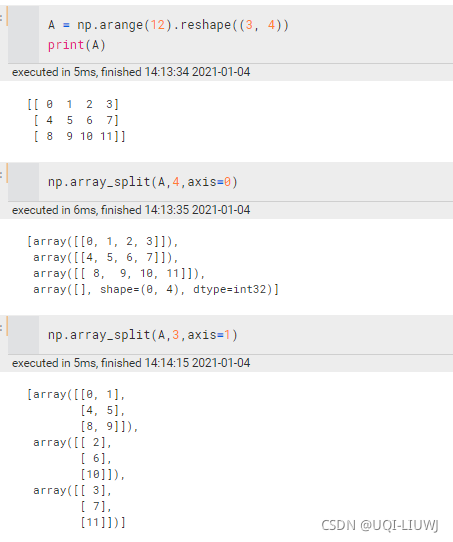
array_split | 不等量分割
| ||||||||||||||||||
np.sin | 逐元素取sin | ||||||||||||||||||
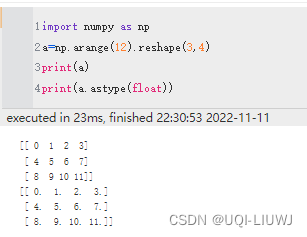
astype | 转换类型
| ||||||||||||||||||
intersect1d |  | ||||||||||||||||||
std | 计算标准差 Axis=0——计算a[…][0][0],a[…][0][1],…的标准差
| ||||||||||||||||||
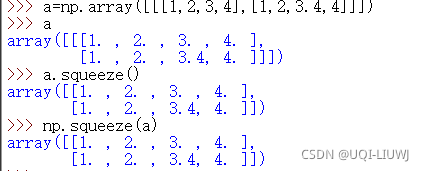
squeeze | 删除单维度条目
| ||||||||||||||||||
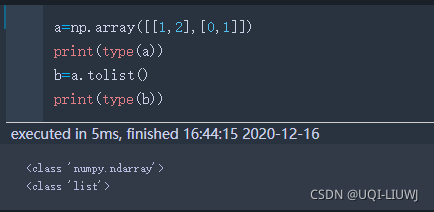
tolist | 转换为list
| ||||||||||||||||||
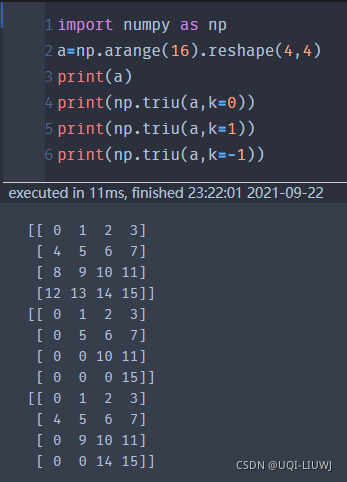
triu(data,k) | 以data为数据,创建一个上三角矩阵,k表示这个上三角的边接往上/下移动几条线的距离
| ||||||||||||||||||
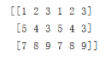
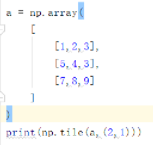
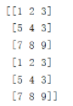
tile | np.tile(a,(2))函数的作用就是将函数将函数沿着X轴扩大两倍。如果扩大倍数只有一个,默认为X轴
np.tile(a,(2,1))第一个参数为Y轴扩大倍数,第二个为X轴扩大倍数。本例中X轴扩大一倍便为不复制。
| ||||||||||||||||||
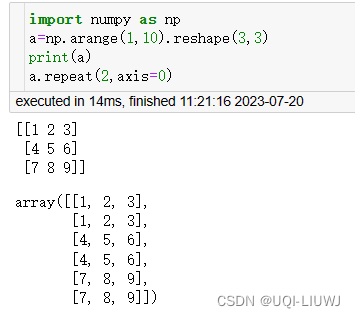
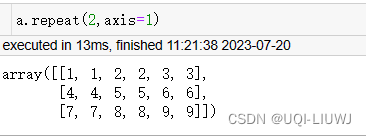
repeat | tile是把ndarray当作一个整体复制的,repeat就是逐行/逐列复制 repeat只能沿着一个轴复制,无法像tile一样多个轴同时复制 注意和上面tile的区别
| ||||||||||||||||||
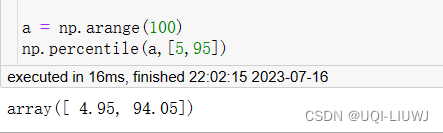
percentage | ndarray的分位数
| ||||||||||||||||||
append | 拼接
| ||||||||||||||||||
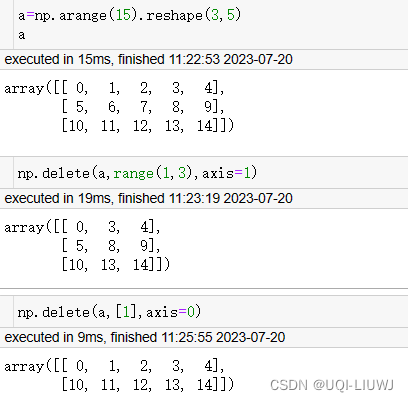
delete | 删除部分行/列
| ||||||||||||||||||
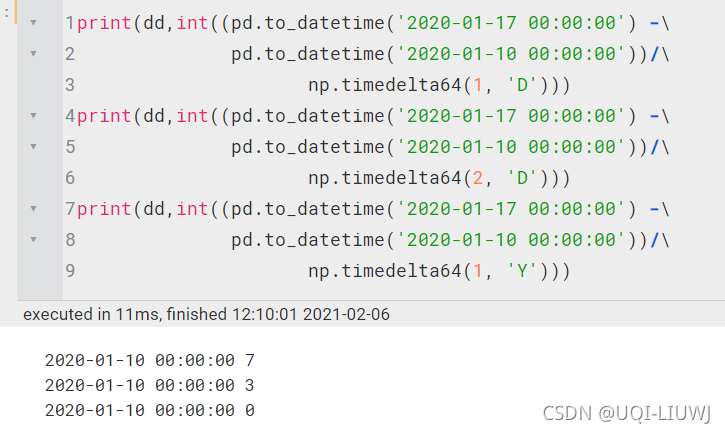
np.timedelta(num,'x') |
计算两个datetime中间差多少时间间隔(向下取整)【Y、M、W、D、h、m、s、ms、us、ns】 | ||||||||||||||||||
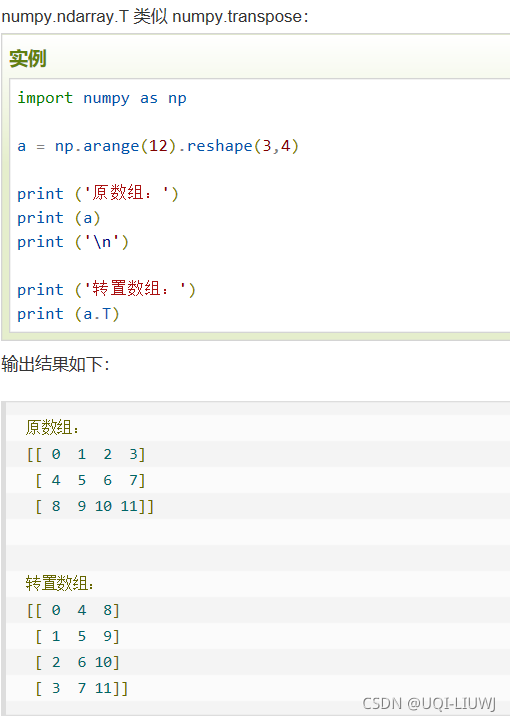
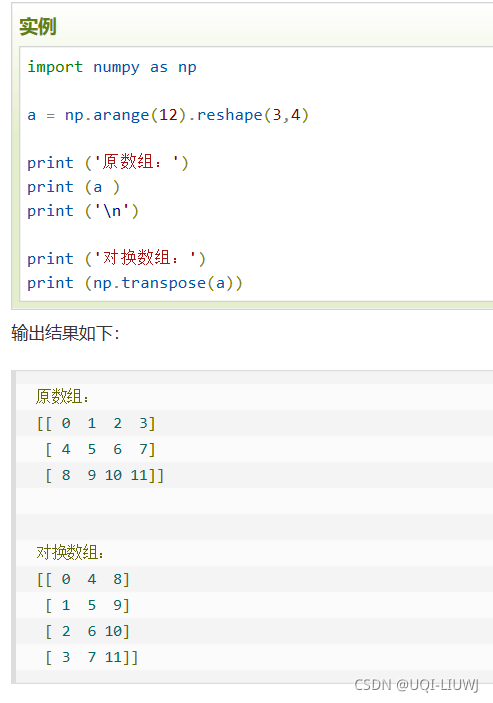
转置 |
| ||||||||||||||||||
where | numpy.where() 有两种用法: 1. np.where(condition, x, y) 满足条件(condition),输出x,不满足输出y。*如果y是数组的话,输出y相应位置的元素 2. np.where(condition) 只有条件 (condition),没有x和y,则输出满足条件 (即非0) 元素的坐标。 这里的坐标以tuple的形式给出,通常原数组有多少维,输出的tuple中就包含几个数组,分别对应符合条件元素的各维坐标。
| ||||||||||||||||||
fromstring | 从string中提取成ndarray
|








 只能读取一个数值序列
只能读取一个数值序列番外篇:理解axis
前面我们提到了axis的用法
Axis=0——
a[..][0][0],a[…][0][1],a[…][0][2]
a[..][1][0],a[…][1][1],a[…][1][2]
Axis=1——
a[0][…][0],a[0][…][1],a[0][…][2]
换一种理解就是:
有两组数据,它们的维度都是(2,3),即都是两行三列的数据。
当axis设为0时,表示我们要修改第一个维度的数据,两组数据的第一个维度都是2,当它们合并时就变成了4,所以合并后的数据的维度就是(4,3),即变成了四行三列。同理,axis设为1,合并后的数据维度就变成了(2,6),即两行六列~
同理,axis参数在其他方法里也可以用同样的方法思考,比如求均值的mean方法,当axis设为0时,对第一个维度的数据进行求均值,维度为(2,3)的数据计算完后就变成了维度为(1,3)的数据
5 文件处理
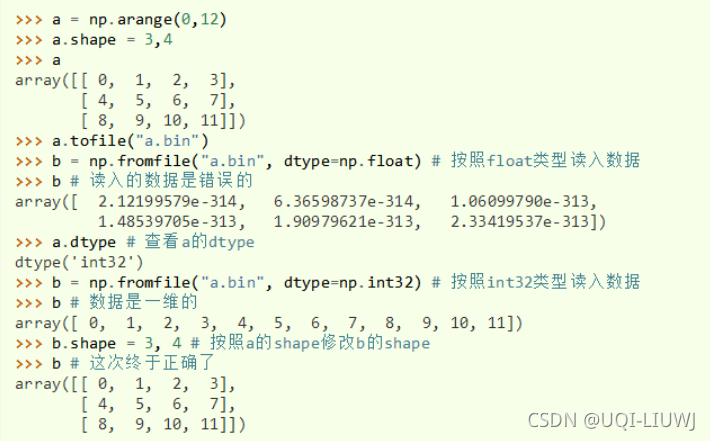
tofile() & fromfile() | tofile()将数组中的数据以二进制格式写进文件 tofile()输出的数据不保存数组形状和元素类型等信息 fromfile()函数读回数据时需要用户指定元素类型,并对数组的形状进行适当的修改
读入数据的时候,需要设置正确的dtype参数,并且修改属组的shape属性,才会得到和原始数据一致的结果 sep参数:tofile 和 fromfile中数值的分隔符 |
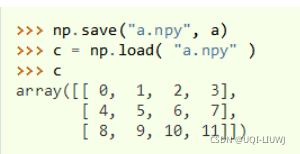
save() & load() | NumPy专用的二进制格式保存数据,它们会自动处理元素类型和形状等信息
如果load出来的不是ndarray,那可能是以压缩形式存储的
解决方法如下: |
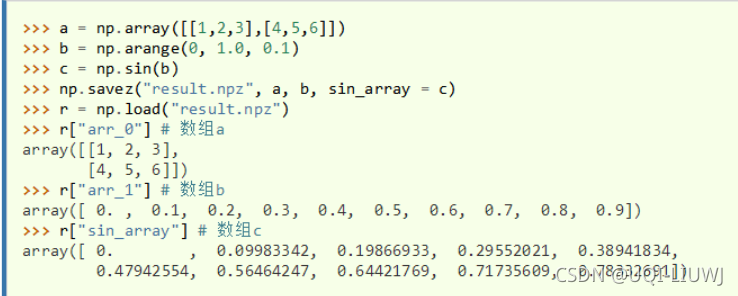
savez() | 将多个数组保存到一个文件中 savez()的第一个参数是文件名,其后的参数都是需要保存的数组
没有起名的话就是'arr_0","arr_1",....起来名字的就是所起的名字((如果不知道取了哪些名字,那就r.files找就可以) |
savez_compressed() | 在savez的基础上 进行一次数据压缩
|
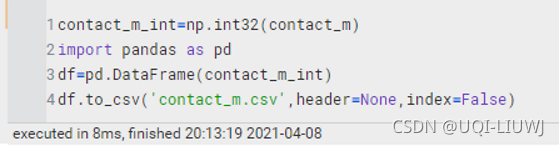
ndarray写入csv | 先转化成DataFrame
|
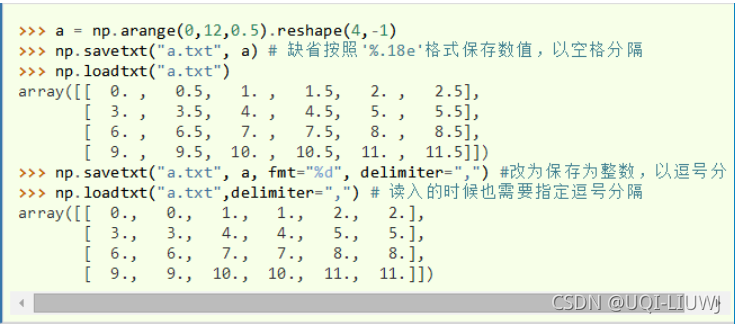
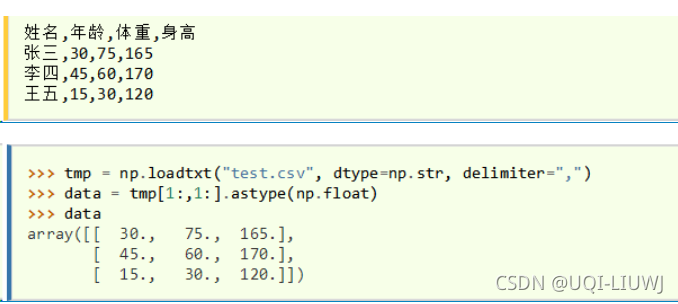
savetxt() & loadtxt() |
|
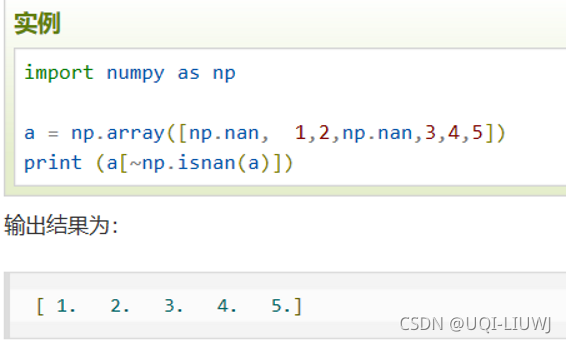
isnan | 判断ndarray里面的元素是否是NaN |



6 set_printoptions
6.1 保留几位小数
rand_arr = np.random.random([5,3])
np.set_printoptions(precision=3)
rand_arr[:4]
'''
array([[0.533, 0.978, 0.868],
[0.248, 0.655, 0.559],
[0.585, 0.662, 0.718],
[0.087, 0.431, 0.201]])
'''
rand_arr = np.random.random([5,3])
np.set_printoptions(precision=7)
rand_arr[:4]
'''
array([[0.0133688, 0.8744358, 0.7132955],
[0.9936528, 0.4186267, 0.8520905],
[0.3911983, 0.274797 , 0.5786427],
[0.863201 , 0.7360145, 0.7583792]])
'''6.2 输出多少个数
np.set_printoptions(threshold=6)
a = np.arange(15)
a
#array([ 0, 1, 2, ..., 12, 13, 14])
np.set_printoptions(threshold=15)
a = np.arange(15)
a
#array([ 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14])
import sys
np.set_printoptions(threshold=sys.maxsize)
a = np.arange(15)
a
#array([ 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14])














 1134
1134











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











