







1. 单周期路径
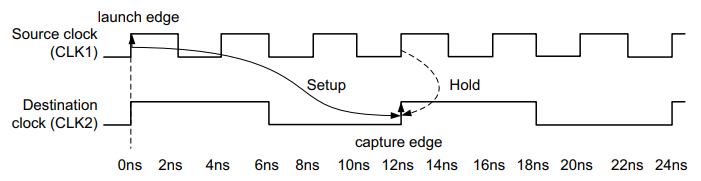
前面的时钟周期约束,都是按照单周期关系进行分析数据路径,即数据的发起沿和采样沿是最邻近的一对时钟沿,如下图所示。

默认情况下,保持时间的检查是以建立时间的检查为前提,即总是在建立时间的前一个时钟周期确定保持时间检查。也就是说,上面的图中,数据在时刻1的边沿被发起,建立时间的检查是在时刻2进行,而保持时间的检查是在时刻1。因此保持时间的检查是在建立时间检查的前一个时钟沿。
但在实际的工程中,经常会碰到数据被发起后,由于路径过长或者逻辑延迟过长要经过多个时钟周期才能到达捕获寄存器;又或者在数据发起的几个周期后,后续逻辑才能使用。这时如果按照单周期路径进行时序检查,就会报出时序违规。因此就需要我们这一节所讲的多周期路径了。
2. 多周期路径
多周期约束的语句:
set_multicycle_path <num_cycles> [-setup|-hold] [-start|-end][-from <startpoints>] [-to <endpoints>] [-through <pins|cells|nets>] 
对于建立时间,num_cycles是指多周期路径所需的时钟周期个数;对于保持时间,num_cycles是指相对于默认的捕获沿,实际捕获沿应回调的周期个数。
发起沿和捕获沿可能是同一个时钟,也可能是两个时钟,参数start和end就是选择参考时钟是发送端还是接收端。
-
start表示参考时钟为发送端(发端)所用时钟,对于保持时间的分析,若后面没有指定
start或end,则默认为为-start; -
end表示参考时钟为捕获端(收端)所用时钟,对于建立时间的分析,若后面没有指定
start或end,则默认为为-end;
因为setup-time是在下一个时钟沿进行捕获时的约束,因此默认是对接收端的约束;而hold-up-time是对同一个时钟沿的约束,目的是发送端不能太快,是对发送端的约束。
对于单周期路径来说,setup的num_cycles为1,hold的num_cycles为0.
多周期路径要分以下几种情况进行分析:
1. 单时钟域
即发起时钟和采样时钟是同一个时钟,多周期路径模型如下图所示。

单时钟域的多周期路径常见于带有使能的电路中,我们以双时钟周期路径为例,其实现电路如下:

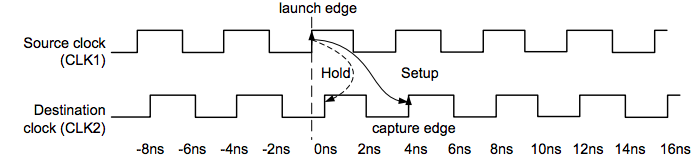
若我们没有指定任何的约束,默认的建立/保持时间的分析就像我们上面所讲的单周期路径,如下图所示。

但由于我们的的数据经过了两个时钟周期才被捕获,因此建立时间的分析时需要再延迟一个周期的时间。所以采用如下的时序约束:
set_multicycle_path 2 -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]在建立时间被修改后,保持时间也会自动调整到捕获时钟沿的前一个时钟沿,如下图所示。

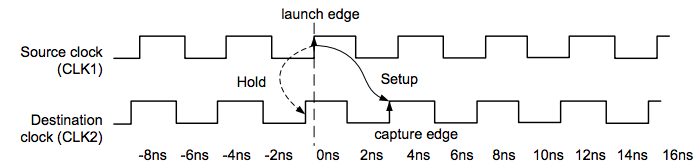
很明显,这个保持时间检查是不对的,因为保持时间的检查针对的是同一个时钟沿,因此我们要把保持时间往回调一个周期,需要再增加一句约束:
set_multicycle_path 1 -hold -end -from [get_pins data0_reg/C] -to [get_pins data1_reg/D] 这里加上-end参数是因为我们要把捕获时钟沿往前移,因此针对的是接收端,但由于我们这边讲的是单时钟域,发送端和接收端的时钟是同一个,因此-end可以省略。这样,完整的时序约束如下:
set_multicycle_path 2 -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
set_multicycle_path 1 -hold -from [get_pins data0_reg/C] -to [get_pins data1_reg/D] 约束完成后,建立保持时间检查如下图所示: 
在单时钟域下,若数据经过N个周期到达,则约束示例如下:
set_multicycle_path N -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
set_multicycle_path N-1 -hold -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]2. 单时钟域,时钟相移
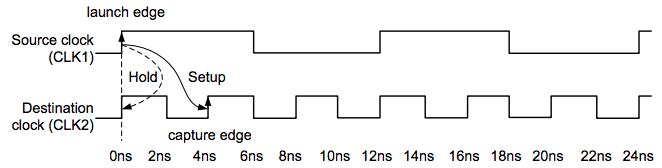
前面我们讨论的是在单时钟域下,发送端和接收端时钟是同频同相的,如果两个时钟同频不同相怎么处理? 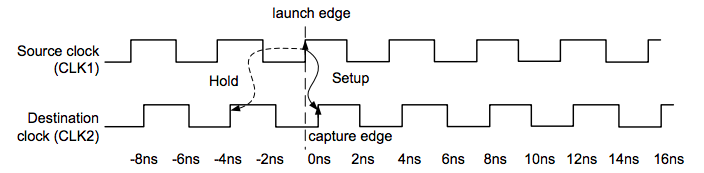
如上图所示,时钟周期为4ns,接收端的时钟沿比发送端晚了0.3ns,若不进行约束,建立时间只有0.3ns,时序基本不可能收敛;而保持时间则为3.7ns,过于丰富。在0ns时刻,接收端捕获到发送的数据后,要再过3.7ns的时间发送端才会发出下一个数据,因此本次捕获的数据最短可持续3.7ns,即保持时间为3.7ns。
因此,在这种情况下,我们应把捕获沿向后移一个周期,约束如下:
set_multicycle_path 2 -setup -from [get_clocks CLK1] -to [get_clocks CLK2]对setup约束后,hold会自动向后移动一个周期,此时hold time的检查是对的,此时的建立保持时间检查如下:
接收端的时钟比发送端的时钟超前
同样的,时钟周期为4ns,但接收端时钟超前了0.3ns,从图中可以看出,此时setup是3.7ns,而保持时间是0.3ns。这两个时间基本已经满足了Xilinx器件的要求,因此无需进行约束。
3. 慢时钟域到快时钟域的多周期 (此时两个时钟域的时钟周期有倍数关系且相位关系是固定的)
假设捕获时钟频率是发起时钟频率的3倍,在没有任何约束的情况下,Vivado默认会按照如下图所示的建立保持时间进行分析。
但我们可以通过约束让建立时间的要求更容易满足,即
set_multicycle_path 3 -setup -from [get_clocks CLK1] -to [get_clocks CLK2]跟上面讲的一样,设置了setup,hold会自动变化,但我们不希望hold变化,因此再增加:
set_multicycle_path 2 -hold -end -from [get_clocks CLK1] -to [get_clocks CLK2] 这里由于发起和捕获是两个时钟,因此-end参数是不可省的。加上时序约束后,Vivado会按照下面的方式进行时序分析。

4. 快时钟域到慢时钟域的多周期 (此时两个时钟域的时钟周期有倍数关系且相位关系是固定的)
假设发起时钟频率是捕获时钟频率的3倍,在没有任何约束的情况下,Vivado默认会按照如下图所示的建立保持时间进行分析。

同理,我们可以通过约束,让时序条件更加宽裕。
set_multicycle_path 3 -setup -start -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path 2 -hold -from [get_clocks CLK1] -to [get_clocks CLK2] 这里的hold约束中没有加-end参数,这样的话默认就是-start,是因为我们把发起时钟回调2个周期,如下图所示。















 6896
6896











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









