







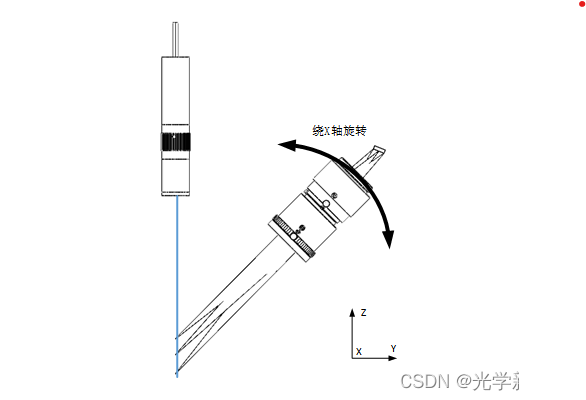
3D线扫相机,又名激光轮廓仪,3D线激光测量仪,基本原理:通过向物体表面投射线激光平面,从而获取该平面与待测物体表面交线处三维点坐标,解算物体深度信息。主要器件:线激光器、镜头、芯片、处理板、接口板。
主要原理:三角测量

其中光学成像原理:沙姆成像
沙姆定律定义:当被摄体平面、影像平面、镜头平面这三个面的延长面相交于一直线时,即可得到全面清晰的影像。
“沙姆定律”原本应用于摄像,为了保证近景到远景均可清晰成像,将焦面倾斜,可以理解为“沙姆成像”是为了扩大摄影的“景深”。
当“沙姆镜头”应用于机器视觉领域-3D线扫相机时,“景深”的定义,是指光学物面FOV-Y方向的视野范围(3D线扫相机中的深度方向)。但是在机器视觉领域-3D面阵相机中,景深的定义仍然是几何光学中的定义。
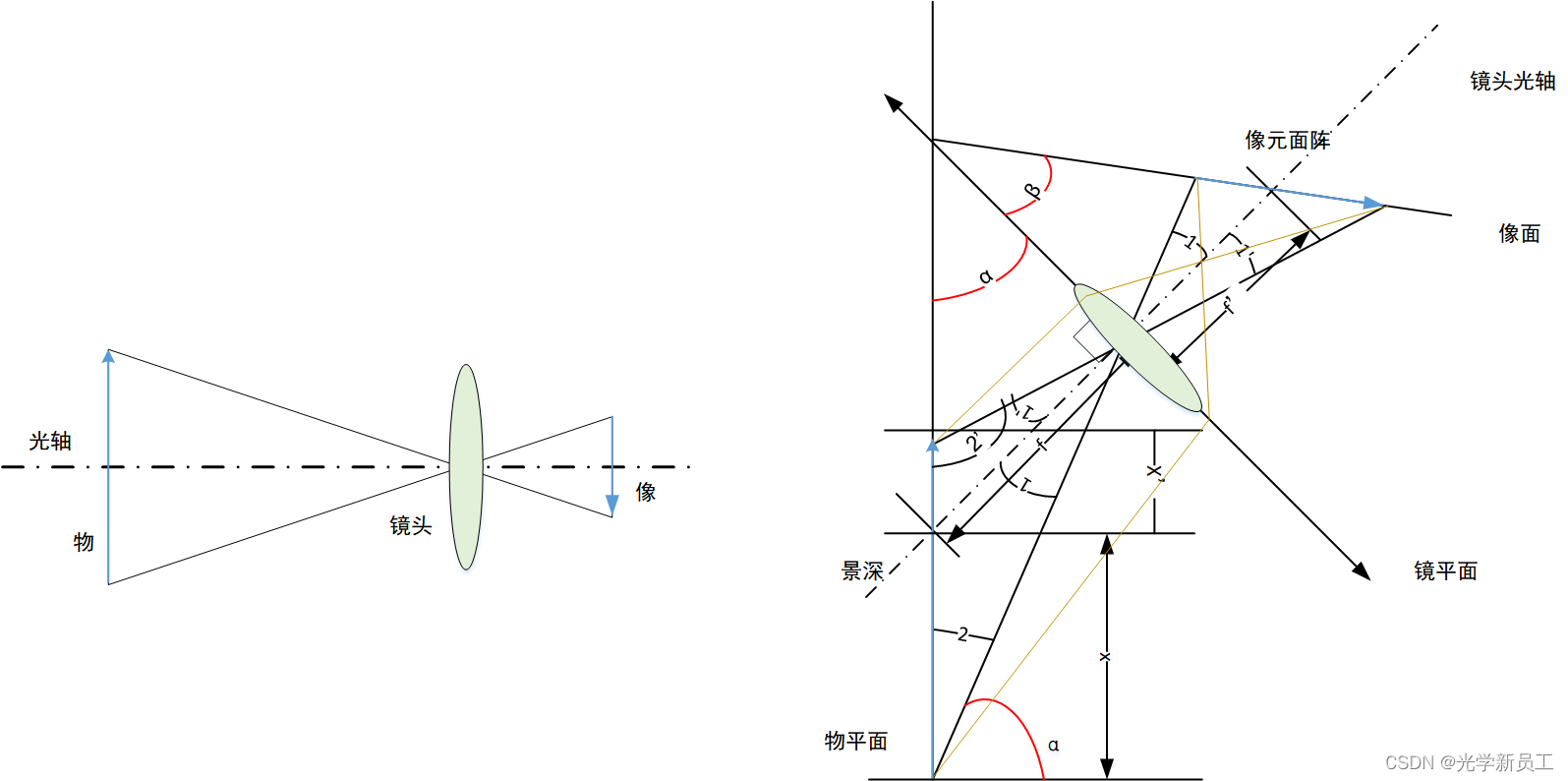
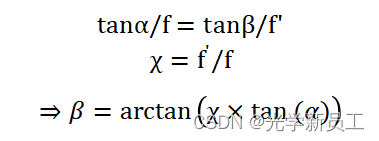
3D相机景深Z(Z轴视野范围),与镜头夹角α、机芯尺寸、镜头放大倍率有关,通过选择合适的镜头夹角α,满足3D相机景深需求;并根镜头放大倍率χ和镜头夹角α,计算沙姆角度β,具体计算方式如下。
沙姆角度估算公式:
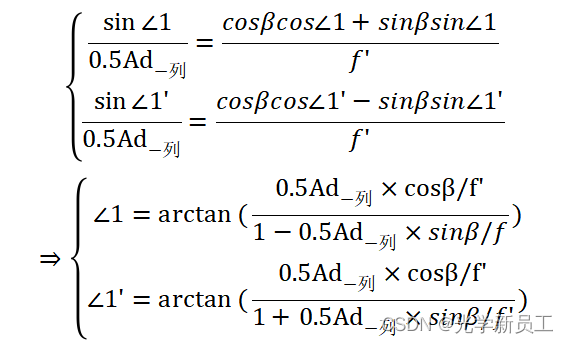
∠1,∠1'计算公式:
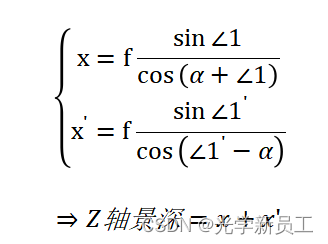
景深计算公式:


















 162
162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











