







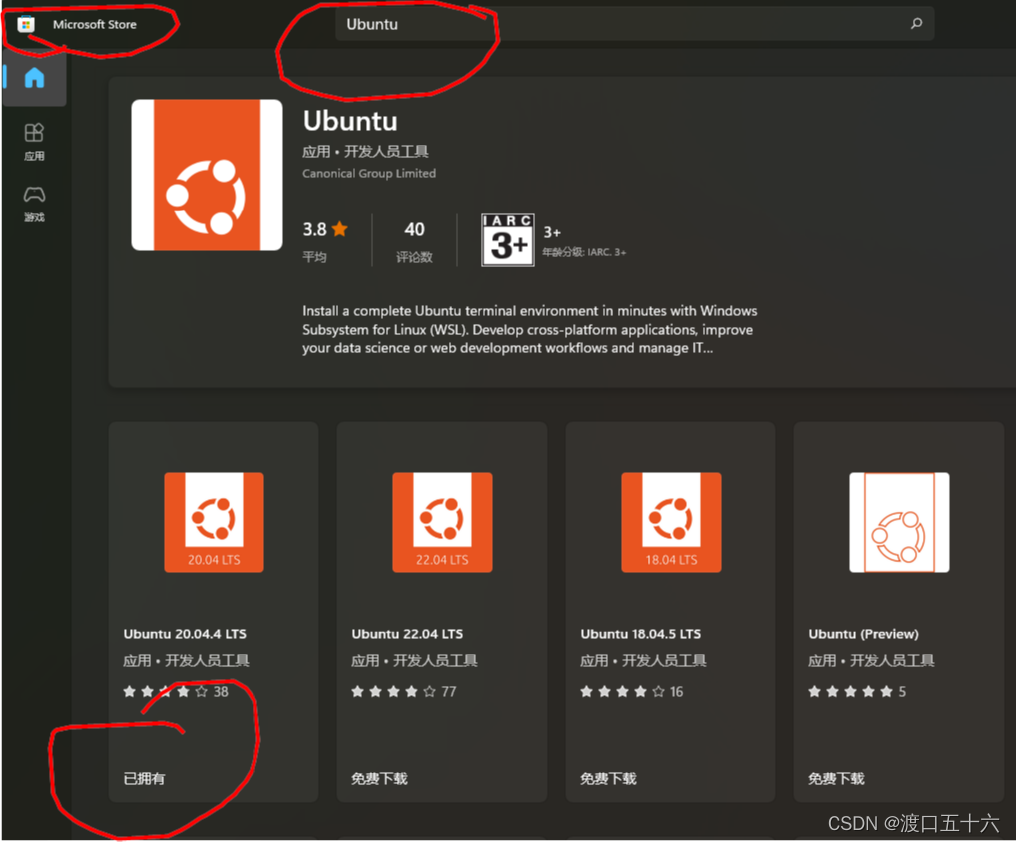
安装Ubuntu
不想安装双系统,不想安装虚拟机,没有独立硬盘,可以使用应用商店里的
报错 Installing, this may take a few minutes… WslRegisterDistribution failed with error: 0x800701bc
之后输入用户名和密码
编程基础
安装g++
sudo apt updata
suda apt-get install g++
编写第一个程序 helloSLAM.cpp
#include <iostream>
using namespace std;
int main( int argc, char** argv )
{
cout<<"Hello SLAM!"<<endl;
return 0;
}
g++编译
g++ helloSLAM.cpp
运行程序
./a.out
使用 cmake编译
安装cmake
sudo apt-get install cmake
编写CMakeLists.txt
# 声明要求的 cmake 最低版本
cmake_minimum_required(VERSION 2.8)
# 声明一个 cmake 工程
project(hellow)
# 添加一个可执行程序
# 语法:add_executable( 可执行程序名 源代码文件 )
add_executable(hello hellowSlam.cpp) # 中间用空格隔离
CMakeLists.txt 和 hellowSlam.cpp是在同一目录,然后在当前目录下对该工程分析
cmake.
make
./可执行程序名 # 执行程序
为了能够更快删除生成的文件,创建一个build文件夹
mkdir build
cd build
cmake ..
make
将自己写的方法编译成库
//name:libHelloSLAM.cpp
//这是一个库文件
#include <iostream>
using namespace std;
void printHello()
{
cout<<"Hello SLAM"<<endl;
}
我们在 CMakeLists.txt 里加一句:
add_library( hello libHelloSLAM.cpp)
编译
cd build
cmake ..
make
这时,在 build 文件夹中会生成一个 libhello.a 文件,这就是我们得到的库。
静态库和动态库
在 Linux 中,库文件分成静态库和共享库两种①。静态库以.a 作为后缀名,共享库以.so结尾。所有库都是一些函数打包后的集合,差别在于静态库每次被调用都会生成一个副本,而共享库则只有一个副本,更省空间。如果我们想生成共享库而不是静态库,只需用:
add_library( hello_shared SHARED libHelloSLAM.cpp )
库文件是一个压缩包,里头带有编译好的二进制函数。不过,仅有.a 或.so 库文件的话,我们并不知道它里头的函数到底是什么,调用的形式又是什么样的。为了让别人(或者自己)使用这个库,我们需要提供一个头文件,说明这些库里都有些什么。因此,对于库的使用者,只要拿到了头文件和库文件,就可以调用这个库了。下面我们来写 libhello 的头文件。
//name:libHelloSLAM.h
#ifndef LIBHELLOSLAM_H_
#define LIBHELLOSLAM_H_
void printHello();
#endif
这样,根据这个文件和我们刚才编译得到的库文件,就可以使用这个函数了。下面我们写一个可执行程序,调用这个简单的函数:
使用库
//name:useHello.cpp
#include "libHelloSLAM.h"
int main( int argc, char** argv )
{
printHello();
return 0;
}
然后,在 CMakeLists.txt 中添加一个可执行程序的生成命令,链接到刚才我们使用的库上:
add_executable( useHello useHello.cpp )
target_link_libraries( useHello hello_shared )
linux的免费IDE(Kdevelop桌面版)
第三讲 三维空间刚体运动
目标:
理解三维空间的刚体运动描述方式:旋转矩阵、变换矩阵、四元数和欧拉角。
掌握 Eigen 库的矩阵、几何模块使用方法。
请不要把向量与它的坐标两个概念混淆。一个向量是空间当中的一样东西,比如说 a。这里 a 并不是和若干个实数相关联的。只有当我们指定这个三维空间中的某个坐标系时,才可以谈论该向量在此坐标系下的坐标,也就是找到若干个实数对应这个向量。例如,三维空间中的某个向量的坐标可以用 R3 当中的三个数来描述。某个点的坐标也可以用 R3来描述。怎么描述的呢?如果我们确定一个坐标系,也就是一个线性空间的基 (e1, e2, e3),那就可以谈论向量 a 在这组基下的坐标了:

所以这个坐标的具体取值,一个是和向量本身有关,第二也和坐标系的选取有关。
向量的外积a x b = a ^ b
坐标系间的欧氏变换
在机器人的运动过程中,常见的做法是设定一个惯性坐标系(或者叫世界坐标系),可以认为它是固定不动的,例如图中的 xW , yW , zW 定义的坐标系。同时,相机或机器人则是一个移动坐标系,例如 xC , yC , zC 定义的坐标系。我们会问:相机视野中某个向量 p,它的坐标为 pc,而从世界坐标系下看,它的坐标 pw。这两个坐标之间是如何转换的呢?这时,就需要先得到该点针对机器人坐标系坐标值,再根据机器人位姿转换到世界坐标系中,这个转换关系由一个矩阵 T 来描述,如图 3-2 所示。

相机运动是一个刚体运动,它保证了同一个向量在各个坐标系下的长度和夹角都不会发生变化。这种变换称为欧氏变换。想象你把手机抛到空中,在它落地摔碎之前,只可能有空间位置和姿态的不同,而它自己的长度、各个面的角度等性质不会有任何变化。这样一个欧氏变换由一个旋转和一个平移两部分组成。首先来考虑旋转。我们设某个单位正交基(e1, e2, e3) 经过一次旋转,变成了(e1’, e2’, e3’)。那么,对于同一个向量 a(注意该向量并没有随着坐标系的旋转而发生运动),它在两个坐标系下的坐标为

根据坐标的定义,有:
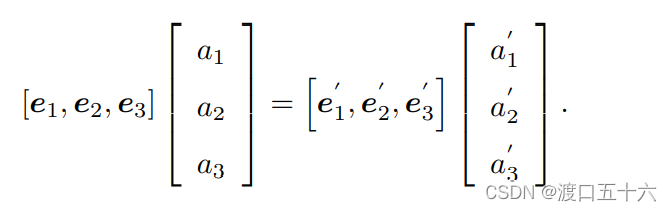
向量的长度和位置没变, 所以基向量乘以坐标是相等的。
为了描述两个坐标之间的关系,我们对上面等式左右同时左乘
那么左边的系数变成了单位矩阵,所以:
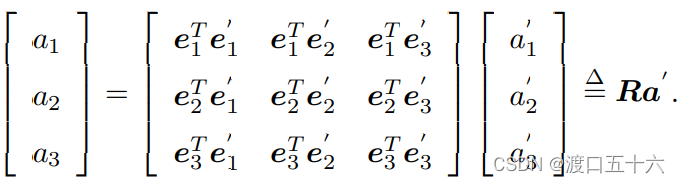
我们把中间的阵拿出来,定义成一个矩阵 R。这个矩阵由两组基之间的内积组成,刻画了旋转前后同一个向量的坐标变换关系。只要旋转是一样的,那么这个矩阵也是一样的。可以说,矩阵 R 描述了旋转本身。因此它又称为旋转矩阵。
旋转矩阵有一些特别的性质。事实上,它是一个行列式为 1 的正交矩阵①。反之,行列式为 1 的正交矩阵也是一个旋转矩阵。所以,我们可以把旋转矩阵的集合定义如下:R是基, det是行列式

SO(n) 是特殊正交群(Special Orthogonal Group)的意思。这个集合由 n 维空间的旋转矩阵组成,特别的,SO(3) 就是三维空间的旋转了。通过旋转矩阵,我们可以直接谈论两个坐标系之间的旋转变换,而不用再从基开始谈起了。换句话说,旋转矩阵可以描述相机的旋转。
由于旋转矩阵为正交阵,它的逆(即转置)描述了一个相反的旋转。按照上面定义方式,有:

显然 RT 刻画了一个相反的旋转。
在欧氏变换中,除了旋转之外还有一个平移。考虑世界坐标系中的向量 a,经过一次旋转(用 R 描述)和一次平移 t 后,得到了a’, 那么把旋转和平移合到一起,有:
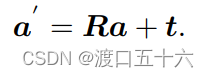
其中,t 称为平移向量。相比于旋转,平移部分只需把这个平移量加到旋转之后的坐标上,显得非常简洁。通过上式,我们用一个旋转矩阵 R 和一个平移向量 t 完整地描述了一个欧氏空间的坐标变换关系。
变换矩阵与齐次坐标
按照a’ = Ra + t的形式进行多次变换的时候会过于复杂。

因此,我们要引入齐次坐标和变换矩阵重写式
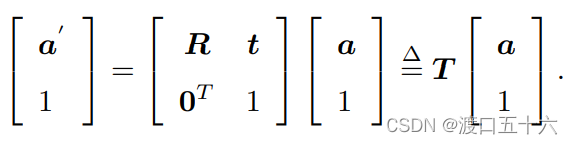
这是一个数学技巧:我们把一个三维向量的末尾添加 1,变成了四维向量,称为齐次坐标。对于这个四维向量,我们可以把旋转和平移写在一个矩阵里面,使得整个关系变成了线性关系。该式中,矩阵 T 称为变换矩阵(Transform Matrix)。我们暂时用 a˜ 表示 a 的齐次坐标。
实践:Eigen
Eigen①是一个 C++ 开源线性代数库。它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。许多上层的软件库也使用 Eigen 进行矩阵运算,包括 g2o、Sophus 等。
安装 Eigen
sudo apt-get install libeigen3-dev
旋转向量
有了旋转矩阵来描述旋转,有了变换矩阵描述一个六自由度的三维刚体运动,但是这种表示略显冗余,因为:SO(3) 的旋转矩阵有九个量,但一次旋转只有三个自由度。因此这种表达方式是冗余的。同理,变换矩阵用十六个量表达了六自由度的变换。那么,是否有更紧凑的表示呢?
我们可以使用一个向量,其方向与旋转轴一致,而长度等于旋转角。这种向量,称为旋转向量(或轴角,Axis Angle)。这种表示法只需一个三维向量即可描述旋转。同样,对于变换矩阵,我们使用一个旋转向量和一个平移向量即可表达一次变换。这时的维数正好是六维。
那么我们需要研究旋转向量和旋转矩阵的转换
假设有一个旋转轴为 n,角度为 θ 的旋转,显然,它对应的旋转向
量为 θn。由旋转向量到旋转矩阵的过程由罗德里格斯公式(Rodrigues’s Formula )表明,

欧拉角
欧拉角则提供了一种非常直观的方式来
描述旋转——它使用了三个分离的转角,把一个旋转分解成三次绕不同轴的旋转。当然,由于分解方式有许多种,所以欧拉角也存在着不同的定义方法。比如说,当我先绕 X 轴旋转,再绕 Y 轴,最后绕 Z 轴,就得到了一个 XY Z 轴的旋转。同理,可以定义 ZYZ、ZYX等等旋转方式。如果讨论更细一些,还需要区分每次旋转是绕固定轴旋转的,还是绕旋转之后的轴旋转的,这也会给出不一样的定义方式。
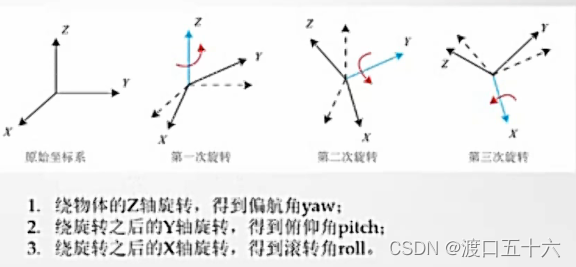
不实用, 因为存在万向锁的情况,具有奇异性,如下图第一次旋转和第三次旋转的效果是一样的(都是绕同一方向轴),所以间接的少了一个自由度

四元数
旋转矩阵用九个量描述三自由度的旋转,具有冗余性;欧拉角和旋转向量是紧凑的,但具有奇异性。事实上,我们找不到不带奇异性的三维向量描述方式 [19]。这有点类似于,当我们想用两个坐标表示地球表面时(如经度和纬度),必定存在奇异性(纬度为 ±90◦ 时经度无意义)。三维旋转是一个三维流形,想要无奇异性地表达它,用三个量是不够的。

未完待续















 1605
1605











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









