







JetsonNano配置RealSense D435i运行环境
文章目录
0. 前言
配置完成后可以参考RealSense D435i同时传输视频深度流、RGB流、IR流和惯性单元IMU流(Python),获取RealSense数据流
1. 系统环境
- 系统:Ubuntu18.04-LTS
2. 安装ubuntu源自带的SDK
- 注册服务器的公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
- 将服务器添加到存储库列表中
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
- 安装SDK
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
安装了 librealsense2-dev 包后,可以使用
g++ -std = c++ 11 filename.cpp-lrealsense2或选择的 IDE 编译具有 librealsense 的应用程序。要使用CMake开始 RealSense,请查看 librealsense/examples/CMake
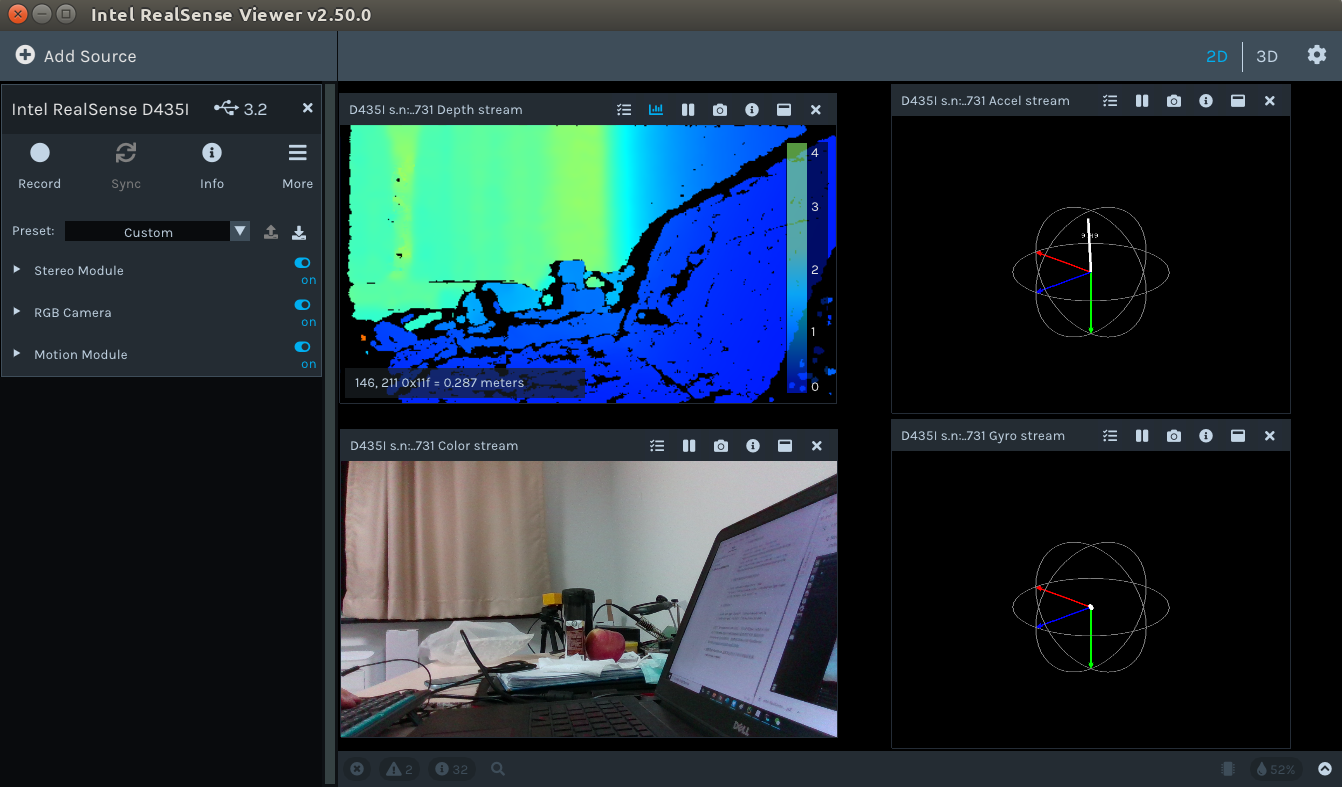
- 重新连接 RealSense 设备并运行以下命令来验证安装:
realsense-viewer
问题及解决
问题
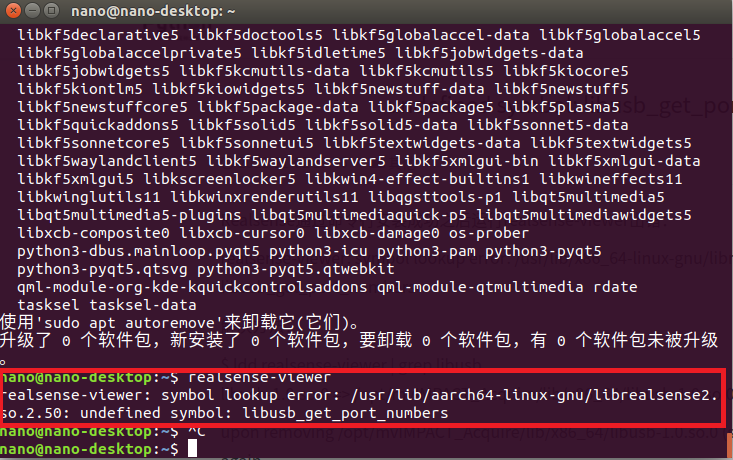
解决方法:
终端输入:ldd /usr/bin/realsense-viewer | grep libusb
显示:libusb-1.0.so.0 => /usr/local/lib/aarch64-linux-gnu/libusb-1.0.so.0 (0x0000007f9023d000)
移除对应文件:sudo rm /usr/local/lib/aarch64-linux-gnu/libusb-1.0.so.0
重新安装libsub-dev:sudo apt-get install libusb-dev
3. 源码编译SDK
-
前提条件
- 联网
- 设置成最大功率模式
MAXN - 将RealSense的USB连接断开
-
构建和补充Jetson L4T内核模块
-
进入
librealsense2的根目录 -
运行带有
-L4T的脚本-
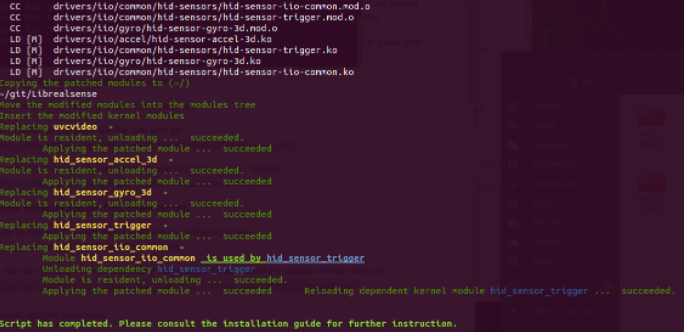
./scripts/patch-realsense-ubuntu-L4T.sh
-
-
该脚本将运行约30分钟,根据互联网速度和执行以下任务:
- 获取构建内核及其模块所需的内核源代码树
- 应用特定于 librealsense 的内核补丁并构建修改后的内核模块
- 尝试将模块嵌入内核
-
-
构建
librealsense2 SDK- 在librealsense根目录下创建并进入build目录
- 执行下面命令:
make 带有python包的librealsense2
sudo apt-get install git libssl-dev libusb-1.0-0-dev libudev-dev pkg-config libgtk-3-dev -y
./scripts/setup_udev_rules.sh
mkdir build && cd build
cmake .. -DBUILD_PYTHON_BINDINGS:bool=true -DPYTHON_EXECUTABLE=/usr/bin/python3 -DBUILD_EXAMPLES=true -DCMAKE_BUILD_TYPE=release -DFORCE_RSUSB_BACKEND=false -DBUILD_WITH_CUDA=false && make -j4 && sudo make install
-
添加环境变量
-
export PYTHONPATH=$PYTHONPATH:/usr/local/lib:/usr/local/lib/python3.6/pyrealsense2
-
-
完成编译安装之后,可在/usr/local/lib/python3.6/pyrealsense2/目录下查看编译好的库文件
pybackend2.cpython-36m-aarch64-linux-gnu.so pybackend2.cpython-36m-aarch64-linux-gnu.so.2.50.0 pyrealsense2.cpython-36m-aarch64-linux-gnu.so.2.50 pybackend2.cpython-36m-aarch64-linux-gnu.so.2 pyrealsense2.cpython-36m-aarch64-linux-gnu.so pyrealsense2.cpython-36m-aarch64-linux-gnu.so.2.50.0
4. 构建Python运行环境
-
执行下面命令,初始化python环境
-
#更新软件源 sudo apt-get update sudo apt-get upgrade #安装python3和pip3 sudo apt-get install python3-dev sudo apt-get install python3-pip pip3 install --upgrade pip #换源 mkdir ~/.pip vim ~/.pip/pip.conf #添加下面内容,清华镜像源 [global] index-url = https://pypi.tuna.tsinghua.edu.cn/simple [install] trusted-host = https://pypi.tuna.tsinghua.edu.cn
-
-
安装软件包
-
#查看已有的包 pip3 list #如果没有需要的包,通过下面命令安装 pip3 install numpy pip3 install opencv-contrib-python
-















 664
664











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









