









 CoppeliaSim(原名VREP)是一款强大的机器人仿真软件,它支持多种编程接口如Matlab、C/C++、Python等,并且提供了丰富的零件库帮助快速搭建机器人模型。通过Lua函数或可视化界面可以轻松实现机器人的运动控制与轨迹规划。
CoppeliaSim(原名VREP)是一款强大的机器人仿真软件,它支持多种编程接口如Matlab、C/C++、Python等,并且提供了丰富的零件库帮助快速搭建机器人模型。通过Lua函数或可视化界面可以轻松实现机器人的运动控制与轨迹规划。
VREP已经更名为CoppeliaSim,但是软件界面和功能和之前的版本变化并不大。在VREP中构建机器人模型的过程是三个软件中最为直观和简单的,从机器人的机械模型(如stl,step格式的CAD文件)可以很快的搭建出漂亮的仿真模型。
VREP提供的编程接口也很多样, Matlab/C/C++/Python/Java都支持。在我以往的使用过程中最常用的是VREP的remote API,这种方式可以把仿真和视觉/控制/规划等功能代码比较清晰的隔离开,更方便在仿真机器人和实际机器人间做切换,但是这种交互方式下传感器数据,尤其是点云/图片类的数据传递起来稍微有些繁琐,因此如果你的项目需要很多这种视觉类传感器的仿真,那么Gazebo或者Webots可能就更合适。
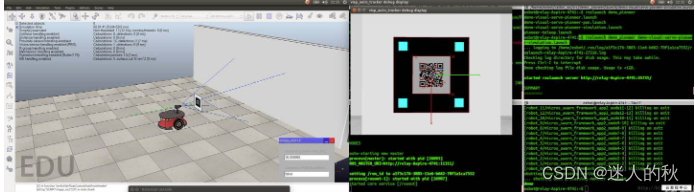
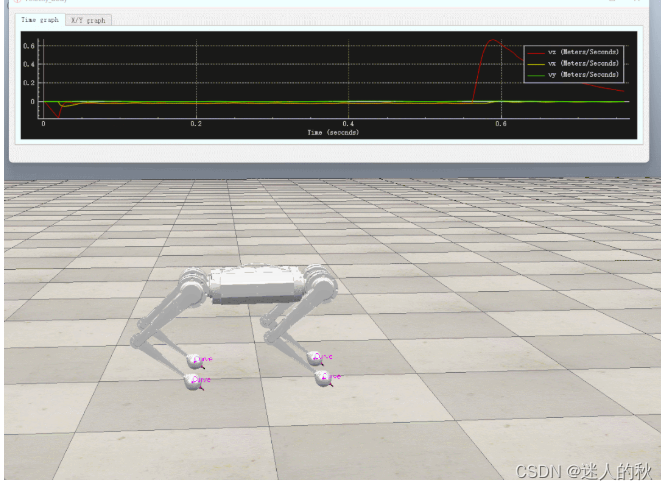
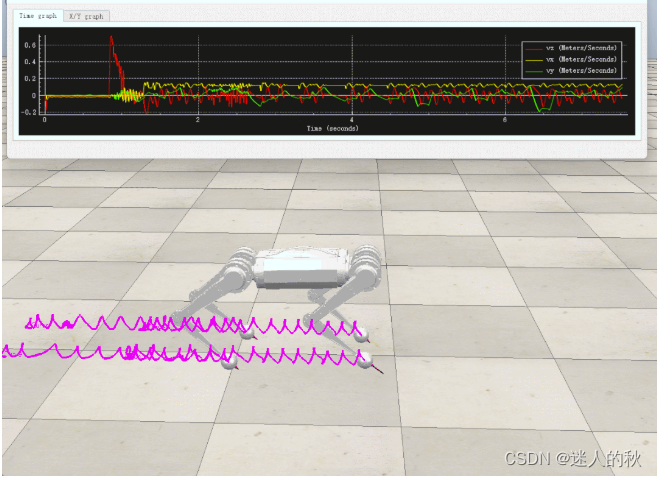
有很多机器臂、轮子之类的零件,可供我们搭建自己需要仿真地物体。可以用lua函数或界面可视化操作joint关节(即电机)运动,我们可以做正逆运动解算,轨迹规划。同时,正因为他方便我们在其他地方调用api接口,支持跨平台运行,比如matlab、visual等,所以很适合我们来验证自己的算法逻辑有没有问题。
官网:Robot simulator CoppeliaSim: create, compose, simulate, any robot - Coppelia Robotics


















 9580
9580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









