






在机器人和人工智能研究领域,仿真平台扮演着至关重要的角色。它们不仅能够加速算法开发和验证过程,还能显著降低研究成本并提高安全性。高质量的仿真环境使研究人员能够在不涉及实体硬件的情况下,快速测试和优化各种算法和策略。这种方法不仅降低了设备损坏的风险,也大大减少了实验所需的时间和资源投入。特别是在涉及复杂场景或危险操作的研究中,仿真平台的价值更加凸显。本文将详细介绍七个主流的仿真平台,涵盖它们的特点、应用场景和技术优势。这些平台各具特色,能够满足不同研究和开发需求。通过对比它们的功能特性、性能表现和应用领域,可以帮助读者朋友选择最适合自己项目需求的仿真工具。
©️【深蓝AI】编译
01 Gymnasium
Gymnasium是OpenAI Gym的维护分支,由Farama基金会负责维护,为强化学习提供了标准化的API接口。它的核心设计理念是简单且符合Python风格,能够表示通用的强化学习问题。Gymnasium包含了丰富的参考环境实现,包括经典控制问题(CartPole、Pendulum等)、Box2D物理环境、MuJoCo机器人环境以及Atari游戏环境等。它提供了强大的封装器(wrapper)系统,允许用户自定义奖励函数、观察空间和动作空间,同时支持环境向量化以加速训练过程。Gymnasium特别适合强化学习的入门学习、算法原型验证、基准测试以及需要标准化接口的研究项目。它与早期的Gym库完全兼容,是目前最广泛使用的强化学习环境标准化框架。
除了标准环境外,Gymnasium还提供丰富的第三方环境集成能力。它的wrapper系统允许用户轻松修改环境行为,如改变奖励结构、添加时间限制等。此外,Gymnasium支还持异步环境,这对于需要并行训练的场景很有帮助。它的API设计非常直观,使得新手能够快速上手,同时也为高级用户提供了足够的灵活性。
官方文档:https://gymnasium.farama.org/index.html
02 MuJoCo
MuJoCo(Multi-Joint dynamics with Contact)是一个专注于多关节动力学和接触问题的通用物理引擎,最初由Roboti LLC开发,现在由DeepMind维护和开源。它的独特之处在于首次在通用物理引擎中结合了广义坐标系统和基于优化的接触动力学,这种方法既保持了机器人学中高效准确的递归算法特点,又采用了现代的接触力求解方法。MuJoCo支持软接触和分析可逆的接触动力学,提供了强大的肌腱几何建模能力,并具有灵活的驱动器模型。它的计算管线可以根据需求重新配置,支持自定义力场、驱动器和碰撞例程。这个引擎特别适合机器人学研究、生物力学研究、动画制作以及机器学习应用,尤其是在需要快速准确模拟具有关节结构的系统时表现出色。
MuJoCo的一大特色就是其独特的接触动力学处理方法,采用了凸优化方法来解决接触问题,这使得仿真更加稳定和准确。它还支持复杂的肌肉-骨骼系统建模,这在生物力学研究中特别有用。最新版本增加了神经网络加速支持,显著提升了仿真性能。
官方文档:https://mujoco.readthedocs.io/en/stable/overview.html
03 Pybullet
PyBullet是一个基于Bullet物理引擎的Python接口物理模拟器,提供了实时的物理仿真能力。它不仅支持刚体动力学模拟,还包含了丰富的机器人模型和环境库。PyBullet的特色在于其跨平台特性和对虚拟现实(VR)的原生支持,同时可以与机器人操作系统(ROS)无缝集成。它支持软体模拟、碰撞检测、约束求解等高级物理特性,并提供了直观的可视化工具。PyBullet被广泛应用于机器人操作任务研究、游戏物理模拟、教育培训以及需要VR集成的项目中。该引擎的性能优异,且有活跃的开发者社区支持。
PyBullet不仅提供了物理仿真,还包含了丰富的机器人控制接口。它的一大特色是支持软体仿真,这在织物操作等任务中非常有用。其内置的调试可视化工具非常强大,支持实时的物理参数调整和轨迹可视化。最近的版本还添加了对强化学习的专门支持。
官方文档:https://pybullet.org/wordpress/index.php/forum-2/
04 Airsim
AirSim是微软开发的基于虚幻引擎的无人机和汽车模拟器。它提供了逼真的环境渲染和准确的物理模型,特别适合计算机视觉和自主驾驶相关的研究。AirSim支持多种传感器模拟,包括相机、激光雷达、IMU等,并提供了丰富的API接口用于控制和数据采集。它的独特优势在于能够生成高质量的训练数据,支持域随机化,并可以进行多智能体仿真。AirSim尤其适合无人机导航、自动驾驶、视觉SLAM等领域的研究和开发。
AirSim的环境生成能力非常强大,支持程序化生成场景和动态天气系统。它的传感器模型非常精确,包括相机畸变、噪声模型等细节。最新版本增加了多智能体协同功能,支持多个飞行器或车辆同时仿真。
官方文档:https://microsoft.github.io/AirSim/

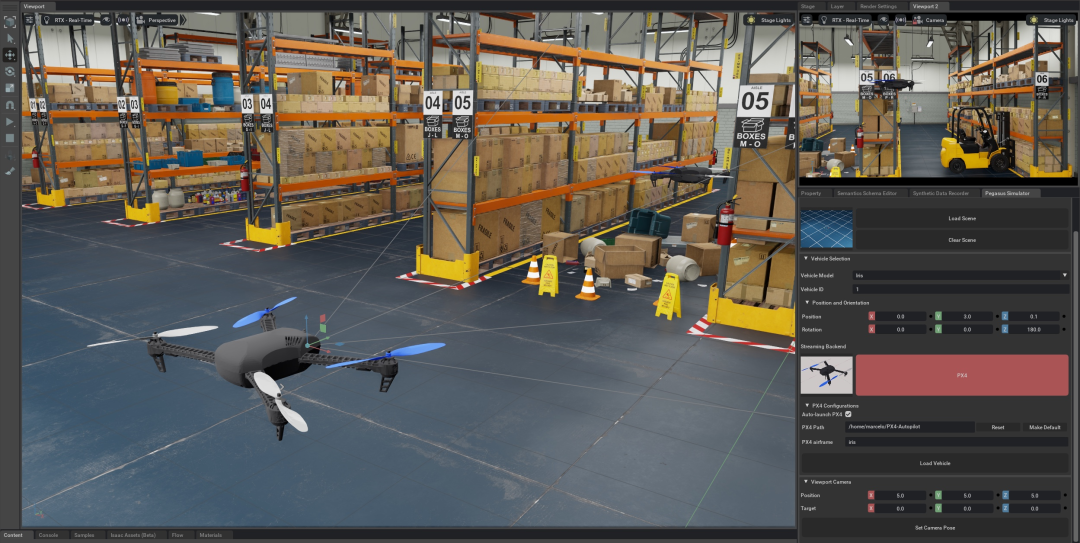
05 Isaac系列
NVIDIA Isaac是一个综合性的机器人开发平台,包括Isaac Sim、Isaac SDK和Isaac GYM等组件。Isaac系统利用NVIDIA的GPU技术提供高度逼真的物理仿真和渲染能力,支持端到端的机器人应用开发。它的特色在于能够进行大规模并行仿真,支持域随机化和合成数据生成,并提供了与真实机器人硬件的无缝集成。Isaac平台特别适合工业机器人应用开发、仓储自动化、协作机器人研究等领域,其GPU加速的仿真能力使其成为训练复杂机器人任务的理想平台。
Isaac平台的突出特点是其完整的工具链,从仿真到部署都有完整支持。它的物理引擎采用了PhysX,支持高度并行的GPU加速。平台提供了丰富的机器人应用开发工具,包括感知、导航、操作等模块。最新版本还加入了强大的合成数据生成功能。
官方文档:https://developer.nvidia.com/isaac/sim
06 Genesis
Genesis是一个革新性的通用物理仿真平台,它的核心是一个全新设计的通用物理引擎,完全用Python实现了前端接口和后端引擎,使其既易用又强大。它最引人注目的特性是其惊人的性能,比现有的GPU加速仿真器快10-80倍,同时还能提供照片级的真实渲染效果。该平台支持多种先进的物理求解器,能够模拟各类材料和物理现象,并具备可微分计算和触觉感知能力。更创新的是,Genesis还整合了生成式AI技术,能够通过自然语言生成多样化的场景交互、任务和奖励函数等数据,从而实现机器人领域的全自动数据生成。这种设计让物理仿真变得更加易用,不仅降低了数据收集成本,还为机器人研究提供了一个统一的、高效的实验平台。
Genesis的创新之处在于其完全Python实现的架构,这使得用户可以方便地扩展和自定义功能。它的生成式AI集成允许用户通过自然语言描述来创建复杂的仿真场景。其高性能计算能力源于优化的并行计算架构,支持大规模场景的实时仿真。
官方文档:https://genesis-world.readthedocs.io/zh-cn/latest/
07 AI2-THOR
AI2-THOR是一个面向室内场景的交互式AI环境,专注于模拟家庭和办公室等室内环境中的物体交互。它提供了照片级别的渲染质量和细致的物理交互模型,支持多种物体操作和导航任务。AI2-THOR的特色在于其高度的交互性,几乎所有可见的物体都可以被操作,包括开关、移动、放置等动作。它特别适合研究视觉导航、物体操作、任务规划等领域,尤其是在需要理解物体功能和空间关系的场景中表现出色。该平台为研究基于视觉的AI任务提供了理想的测试环境。
AI2-THOR特别适合研究需要理解物体功能和空间关系的AI任务。它支持复杂的物体状态变化,如可以打开的抽屉、可以煮食的炉灶等。最新版本增加了程序化生成的室内场景,大大增加了环境的多样性。其物理引擎支持基于Unity的高质量物理仿真。
官方文档:https://ai2thor.allenai.org/

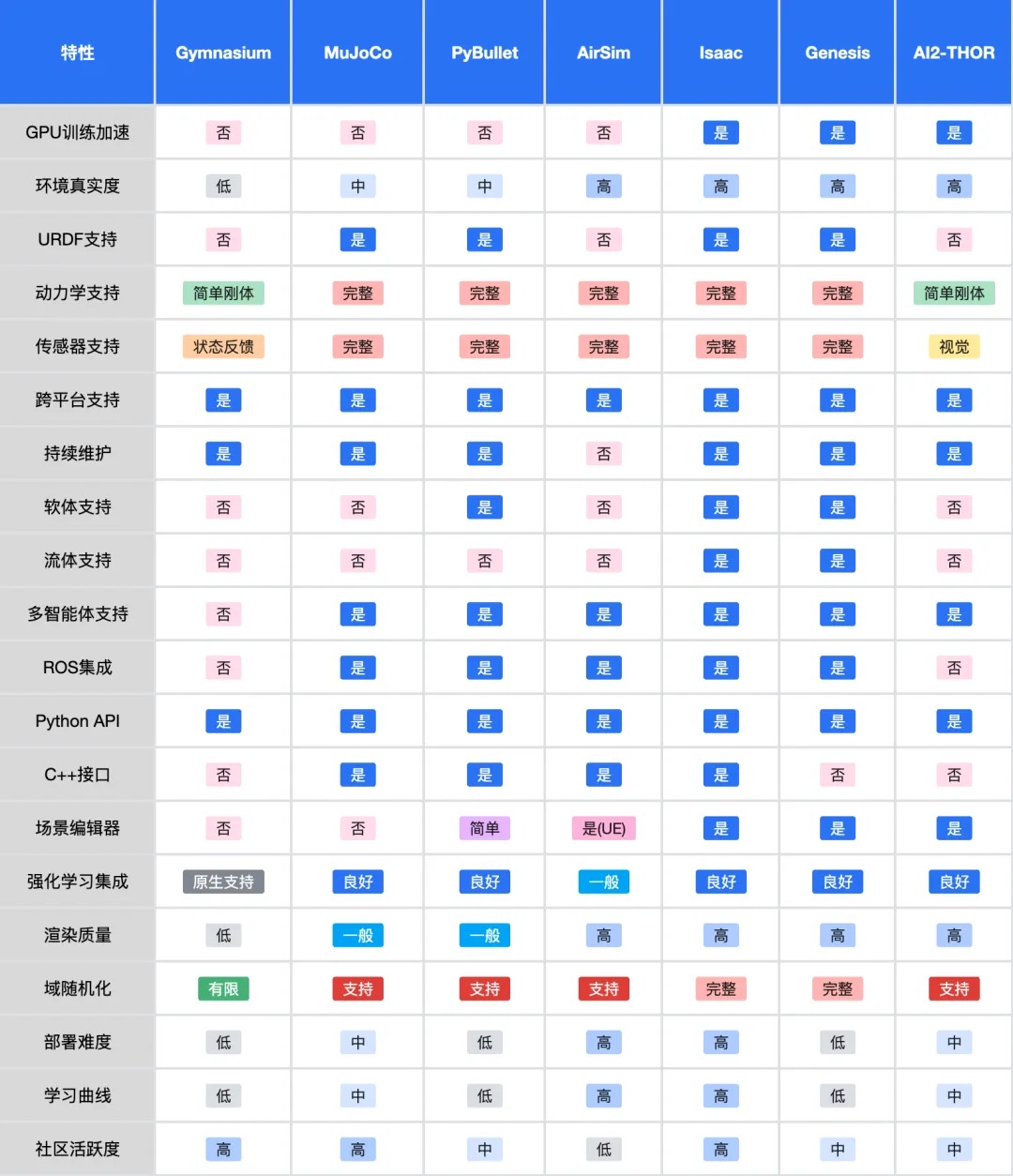
不同的仿真平台各有其独特优势和适用场景。Gymnasium适合强化学习入门和算法验证;MuJoCo在机器人动力学仿真方面表现出色;PyBullet提供了优秀的通用物理仿真能力;AirSim专注于无人机和自动驾驶场景;Isaac系列提供了完整的工业级解决方案;Genesis带来了革新性的高性能仿真体验;而AI2-THOR则在室内场景交互仿真方面独树一帜。下表详细对比了这些平台在各个技术特性上的表现。读者朋友可以根据需要选择适合自己的具身智能仿真器。

















 3716
3716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









