






2 熟悉Eigen矩阵运算
- x x x有解且唯一 ⇔ \Leftrightarrow ⇔ r ( A ) = r ( A ∣ b ) = n r(A)=r(A|b)=n r(A)=r(A∣b)=n
- 首先,将方程组未知数系数通过消元变换为上三角矩阵。
其次,使用回带法,根据上三角矩阵特点,得出方程的解 - QR方法是用于求解矩阵所有特征值的算法,QR分解就是把矩阵分解成一个正交矩阵和一个上三角矩阵。
- Cholesky 分解是把一个对称正定的矩阵表示成一个下三角矩阵L和其转置的乘积的分解。它要求矩阵的所有特征值必须大于零,故分解的下三角的对角元也是大于零的。Cholesky分解法又称平方根法,是当A为实对称正定矩阵时,LU三角分解法的变形。
#include <iostream>
using namespace std;
#include <ctime>
// Eigen 核心部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
using namespace Eigen;
#define MATRIX_SIZE 100
int main(int argc, char** argv) {
Matrix<double, Dynamic, Dynamic> matrix_NN
= MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);
matrix_NN = matrix_NN * matrix_NN.transpose(); // 保证半正定
Matrix<double, Dynamic, 1> v_Nd = MatrixXd::Random(MATRIX_SIZE, 1);
VectorXd x(100);
// 通常用矩阵分解来求,例如QR分解,速度会快很多
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout << "x = " << x.transpose() << endl;
return 0;
}
3 几何运算练习
#include <iostream>
#include <vector>
#include <algorithm>
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace std;
using namespace Eigen;
int main(int argc, char** argv) {
Quaterniond q1(0.55, 0.3, 0.2, 0.2), q2(-0.1, 0.3, -0.7, 0.2);
q1.normalize();
q2.normalize();
Vector3d t1(0.7,1.1,0.2),t2(-0.1,0.4,0.8);
Vector3d p1(0.5,-0.1,0.2);
Isometry3d T1w(q1),T2w(q2);
T1w.pretranslate(t1);
T2w.pretranslate(t2);
Vector3d p2=T2w*T1w.inverse()*p1;
cout<<endl<<p2.transpose()<<endl;
return 0;
}
- 前置知识:
- 单位正交基
- 向量的坐标:设
η
1
,
η
2
,
.
.
.
η
k
{\eta _1},{\eta _2},{...\eta _k}
η1,η2,...ηk是
V
V
V的一个基,则
V
V
V的每个元素
α
\alpha
α都可以用
η
1
,
η
2
,
.
.
.
η
k
{\eta _1},{\eta _2},{...\eta _k}
η1,η2,...ηk唯一线性表示:
α = c 1 η 1 + c 2 η 2 + . . . + c k η k \alpha = c_1{\eta _1}+c_2{\eta _2}+{...+c_k\eta _k} α=c1η1+c2η2+...+ckηk
称其中的系数 c 1 , c 2 , . . . , c k c_1,c_2,...,c_k c1,c2,...,ck为 α \alpha α关于基 η 1 , η 2 , . . . η k {\eta _1},{\eta _2},{...\eta _k} η1,η2,...ηk的坐标,它是一个 k k k维向量。 - 正交矩阵:
A
A
T
=
I
AA^T=I
AAT=I
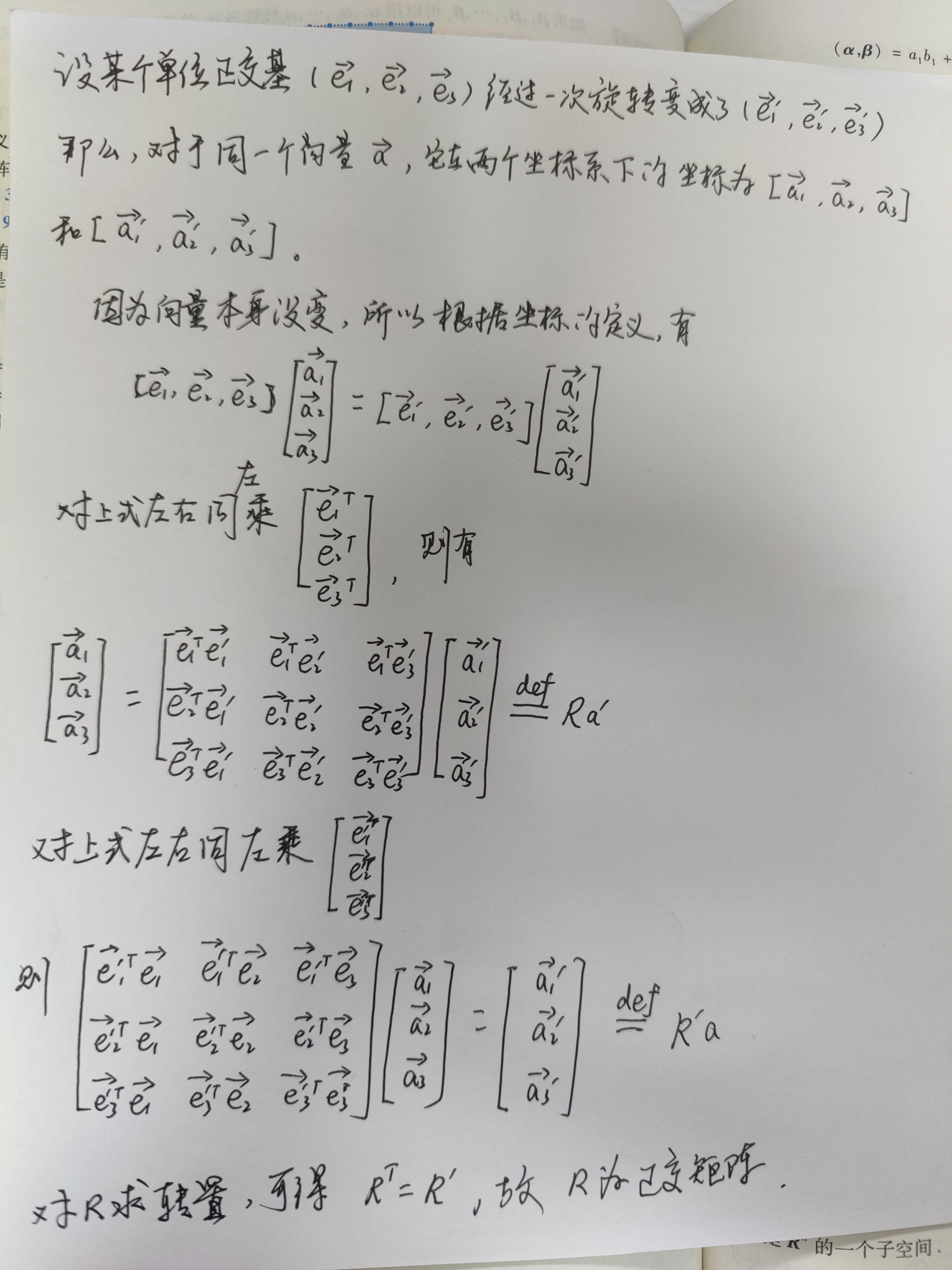
对 R R T = I RR^T=I RRT=I两边取行列式,有 ∣ R ∣ 2 = 1 |R|^2=1 ∣R∣2=1。故 R R R的行列式等于正负1,认为规定旋转矩阵行列式为1
参考:https://blog.csdn.net/lhxez6868/article/details/100165447















 393
393











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









