







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
里程计标定作业回顾
初学小白,主要为了理解作业中需要自己编写代码的每一句的含义,该笔记借鉴了CSDN上许多博客,就不做一一注释了,如有侵权,联系我加注释或者删除。
提示:以下是本篇文章正文内容,下面案例可供参考
一、main.cpp中cal_delta_distance函数
cal_delta_distance代码如下:
Eigen::Vector3d cal_delta_distance(Eigen::Vector3d odom_pose)
{
static Eigen::Vector3d now_pos,last_pos;//定义当前位姿和上一次的位姿 Vector3d默认定义一个列向量(3*1)
Eigen::Vector3d d_pos; //return value //返回值为当前位姿-上一次位姿
now_pos = odom_pose; //现在位姿由里程计获取
//TODO:需要编写的代码区域
d_pos = now_pos - last_pos;
Eigen::AngleAxisd temp(last_pos(2),Eigen::Vector3d(0,0,1)); //定义一个旋转向量(3*1)last_pos(2)为旋转角 Eigen::Vector3d(0,0,1)为旋转轴
Eigen::Matrix3d trans=temp.matrix().inverse();//定义一个Matrix3d(三阶方阵) matrix()函数将temp(旋转向量)转化旋转矩阵 inverse()求逆
d_pos = trans*d_pos;//直接相减求位姿差是在世界坐标系中的结果,而激光雷达的scan-matching的位姿差需要以上一时刻的位姿作为参考系,因此需要将直接相减的结果做一次旋转。
//end of TODO:
last_pos = now_pos;
return d_pos;
}
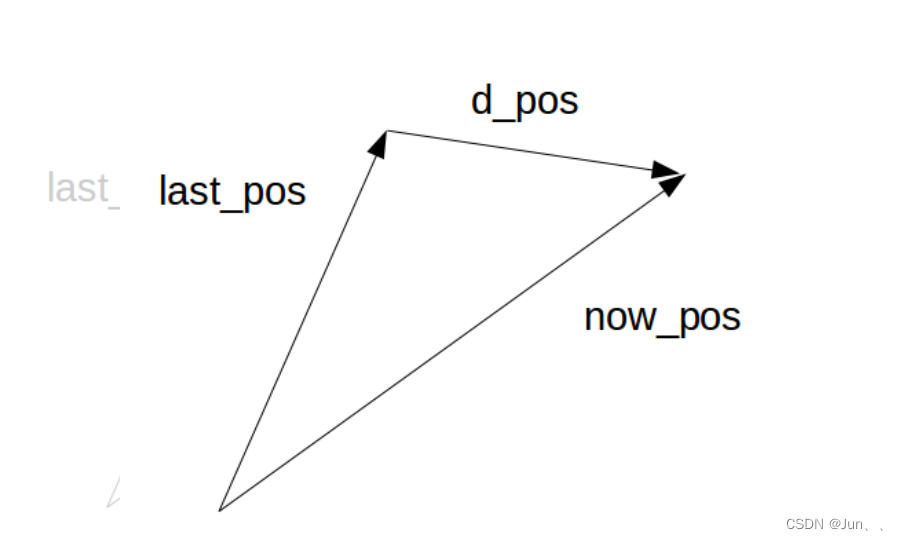
d_pos=now_pos - last_pos; 解释:上图可看出
d_pos = trans*d_pos; 解释:直接相减求位姿差是在世界坐标系中的结果,而激光雷达的scan-matching的位姿差需要以上一时刻的位姿作为参考系,因此需要将直接相减的结果做一次旋转。使用AngleAxis,可以使用这个它乘向量实现旋转操作(因为定义了运算符重载)
Eigen::Matrix3d trans=temp.matrix().inverse(); 解释:
二、Odom_Calib.cpp中Add_Data函数
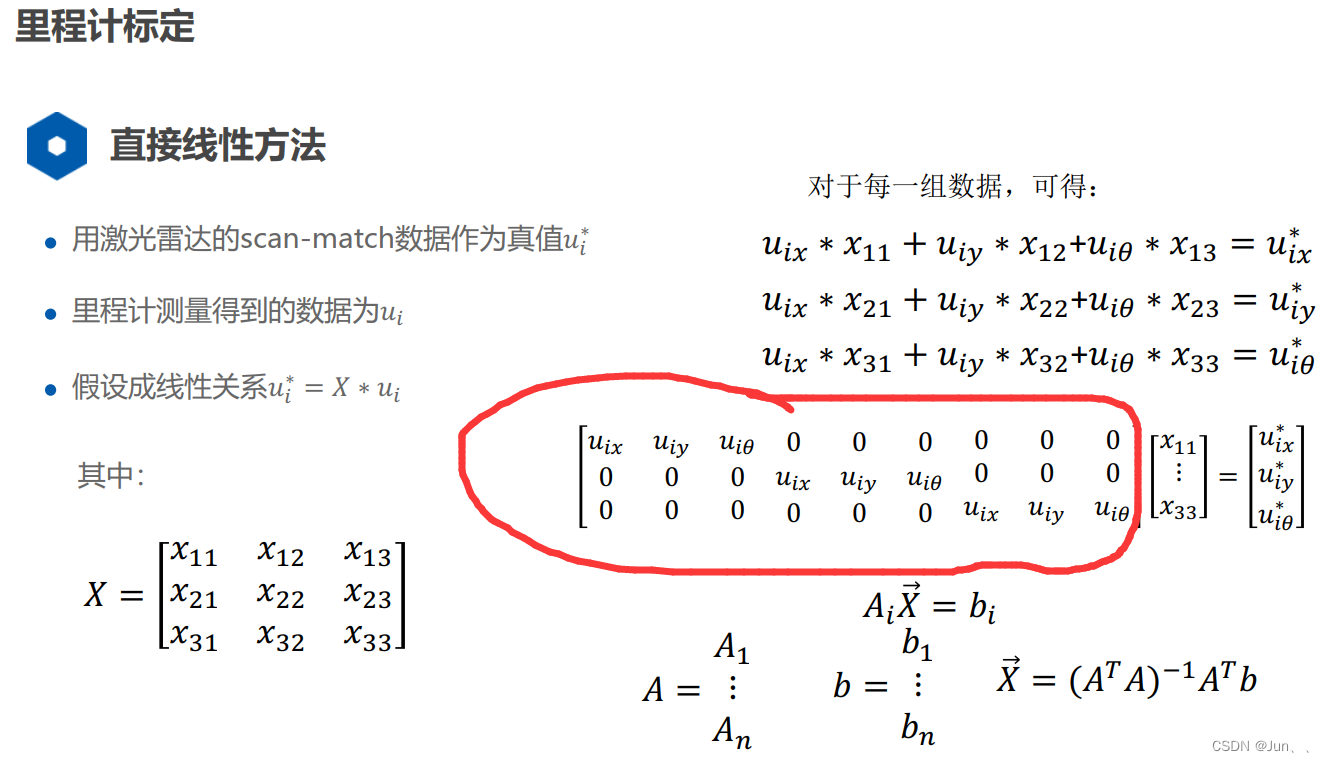
Ax=b
构建最小二乘需要的超定方程组A
A为下图中红圈中的矩阵(3*9)
/*
输入:里程计和激光数据
构建最小二乘需要的超定方程组Ax = b
*/
bool OdomCalib::Add_Data(Eigen::Vector3d Odom,Eigen::Vector3d scan)
{ //Odom为里程计数据 scan为激光数据
if(now_len<INT_MAX)
{
//直接线性方法 Ax=b A为里程计数据 b为激光数据
//TODO: 构建超定方程组
Eigen::Matrix<double,3,9> temp_A;//定义一个矩阵(3*9)
Eigen::Vector3d temp_b; //定义一个三维列向量(3*1)
temp_A << Odom(0), Odom(1),Odom(2),0,0,0,0,0,0, //Odom(0)Odom(1)Odom(2)分别是里程计的三个数据
0,0,0,Odom(0), Odom(1),Odom(2),0,0,0, //构成矩阵A
0,0,0,0,0,0,Odom(0), Odom(1),Odom(2);
temp_b << scan(0),scan(1),scan(2); // scan为激光数据保存在temp_b矩阵中
// 给到A和B
A.block<3,9>(3*now_len,0) = temp_A; //
b.block<3,1>(3*now_len,0) = temp_b; //
//end of TODO
now_len++;
return true;
}
else
{
return false;
}
}
三、Odom_Calib.cpp中Solve函数
矩阵分解
矩阵分解 (decomposition, factorization)是将矩阵拆解为数个矩阵的乘积,可分为三角分解、满秩分解、QR分解、Jordan分解和SVD(奇异值)分解等,常见的有三种:1)三角分解法 (Triangular Factorization),2)QR 分解法 (QR Factorization),3)奇异值分解法 (Singular Value Decompostion)。
QR分解法:是将矩阵分解成一个正规正交矩阵与上三角形矩阵,所以称为QR分解法,与此正规正交矩阵的通用符号Q有关。此处使用了colPivHouseholderQr().solve()函数
Add_Data代码如下:
/*
* TODO:
* 求解线性最小二乘Ax=b
* 返回得到的矫正矩阵
*/
Eigen::Matrix3d OdomCalib::Solve()
{
Eigen::Matrix3d correct_matrix;
//TODO:求解线性最小二乘
Eigen::Matrix<double,9,1> X_ = A.colPivHouseholderQr().solve(b);//进行QR分解线性方程组 colPivHouseholderQr().solve()
correct_matrix << X_(0),X_(1),X_(2),X_(3),X_(4),X_(5),X_(6),X_(7),X_(8);//将得到的解存入correct_matrix中
//end of TODO
return correct_matrix;
}
总结
再次回顾了第二章作业的代码,对实现一个直接线性里程计的过程有了更深刻的认识,学习了Eigen库的一些常用类型和方法。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









