







 本文深入探讨了雅克比矩阵在机器人学中的关键作用,特别是在动力学建模和坐标变换过程中。通过解析雅可比矩阵如何连接关节空间与操作空间的速度,揭示了其在机械手末端运动控制中的重要性。
本文深入探讨了雅克比矩阵在机器人学中的关键作用,特别是在动力学建模和坐标变换过程中。通过解析雅可比矩阵如何连接关节空间与操作空间的速度,揭示了其在机械手末端运动控制中的重要性。
可算有人能把雅克比讲清楚了
https://blog.csdn.net/qq_22121229/article/details/83822731
雅各比行列式在积分坐标变换中的应用
上一篇 【数学】均匀分布生成其他分布的方法文章中提到了讲直角坐标系中的无法直接计算正态分布的积分,则将其转换到极坐标之中。在转换之后计算积分的时候【这里相当于用概率累计密度CDF用积分求,然后求导即为概率密度函数PDF】需要乘以一个雅各比行列式。另外注意,因为雅各比行列式是行列式所以其对应的矩阵必为一个方阵,且线性无关。
具体定理: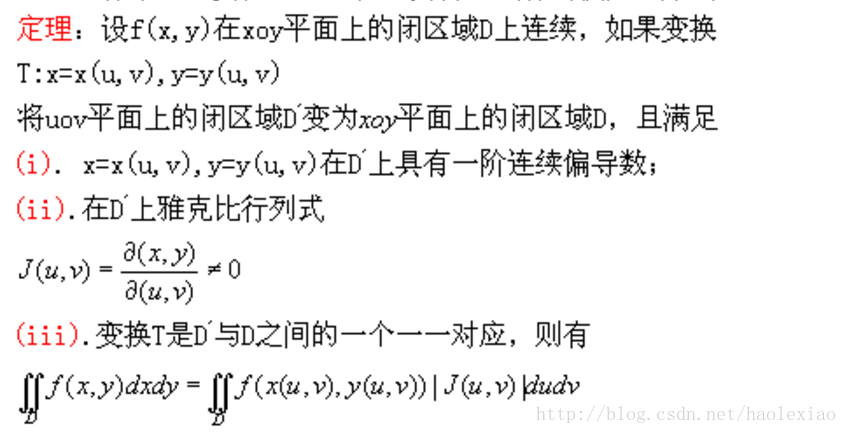
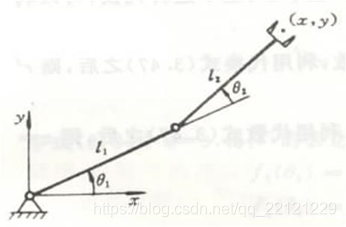
动力学建模方程为
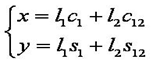
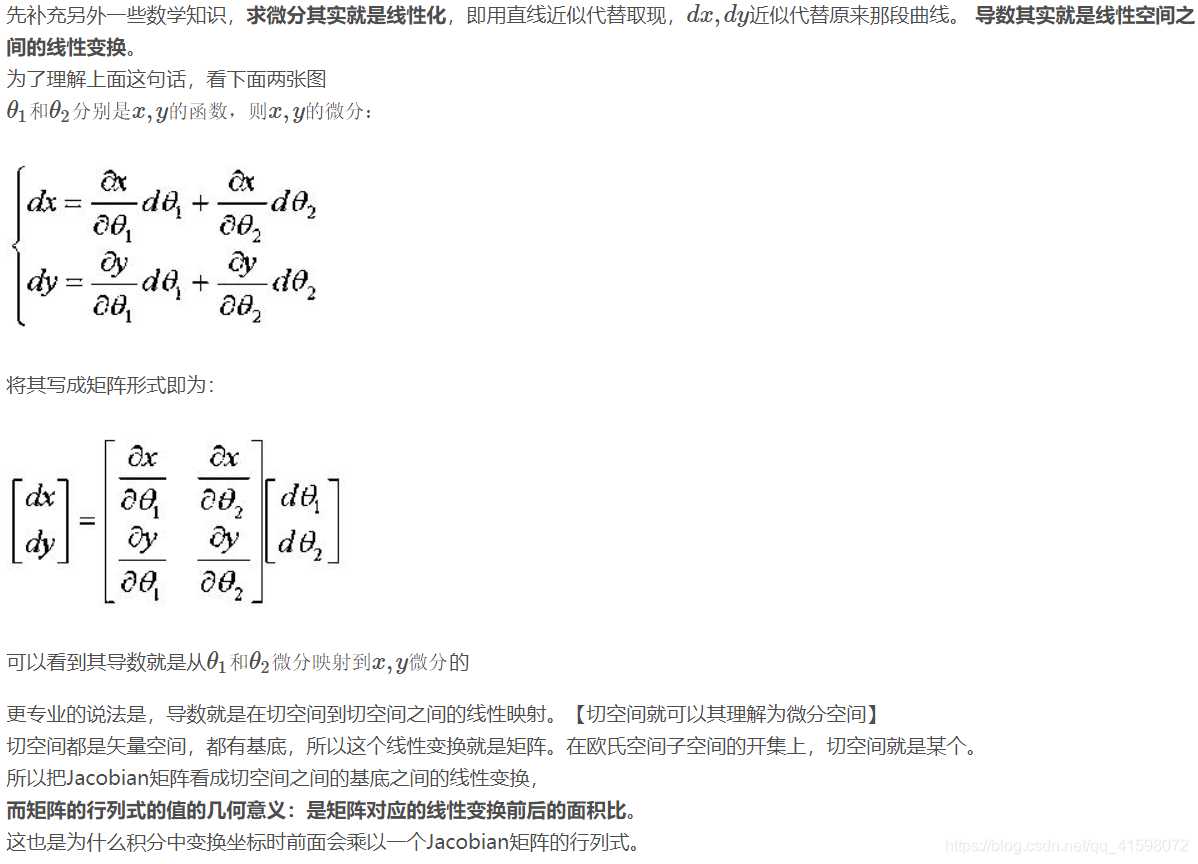
对其进行微分线性化
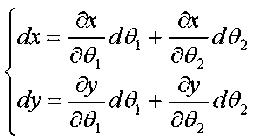
写成雅可比矩阵形式
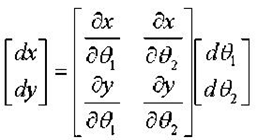
简写为dx=Jdθ, 其中的J称之为机械手的雅可比矩阵,反映了关节微小位移dθ与手部(手爪)微小运动dx之间的关系.
它可看成是从关节空间到操作空间运动速度的传动比,同时也可用来表示两空间之间力的传递关系.
假设关节速度为![]() 未端点速度为,对dx=Jdθ两端同除以dt
未端点速度为,对dx=Jdθ两端同除以dt
![]()
因此, 机械手的雅可比矩阵定义为它的操作空间速度与关节空间速度的线性变换,v为机械手未端在操作空间的广义速度, 或称操作速度, w为关节速度.


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











