







定义
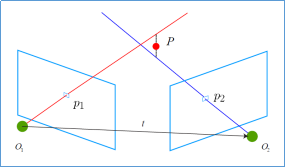
知道两图之间关系后对图中匹配点进行三角化与深度估计,估计出现实中物体相对于相机的距离。
步骤:
几何关系:

求时,两侧乘后得:

或者同时解:
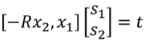
求的最小二乘解:

三角化中的问题
1.解得深度的质量与平移相关。R、T很小是或者相机移动过小可能导致两点趋近平行甚至发散。平行表现方式:行列式越近零两点关系越接近平行。越平行解得深度的质量越差;深度解出值为负表示两点关系发散。
2.平移过大时特征匹配可能不成功。
3.相机前进时虽然有位移,但由于图像中心的点没有视差而无法三角化。
4.问题:特征点的提取算法要有一定的可重复性;
描述子之间的距离差别不能过大;
耗时!提取出来的点不一定都是特征点,因此会浪费计算量;匹配特征亦是如此(eg:ORS——10ms)。相比之下ICP等求解基本不耗时。
关于问题的改进:
减少特征点数量;但是匹配是会受到影响。相关性能也会大大降低。















 738
738











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









