









开发环境如下:
开发板:米联客ZYNQ7100,MZ7100FA开发板;
AD7606模块:米联客的AD7606,串行输出模式,这里只有通道1有输入,所以只需要输出通道1;
EDA:VIVADO2019.2;
硬件连接实物如图:

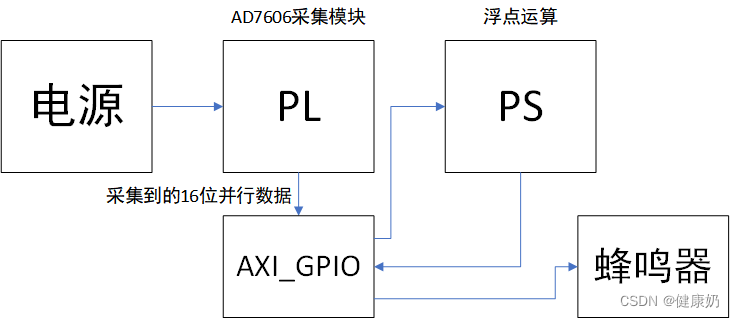
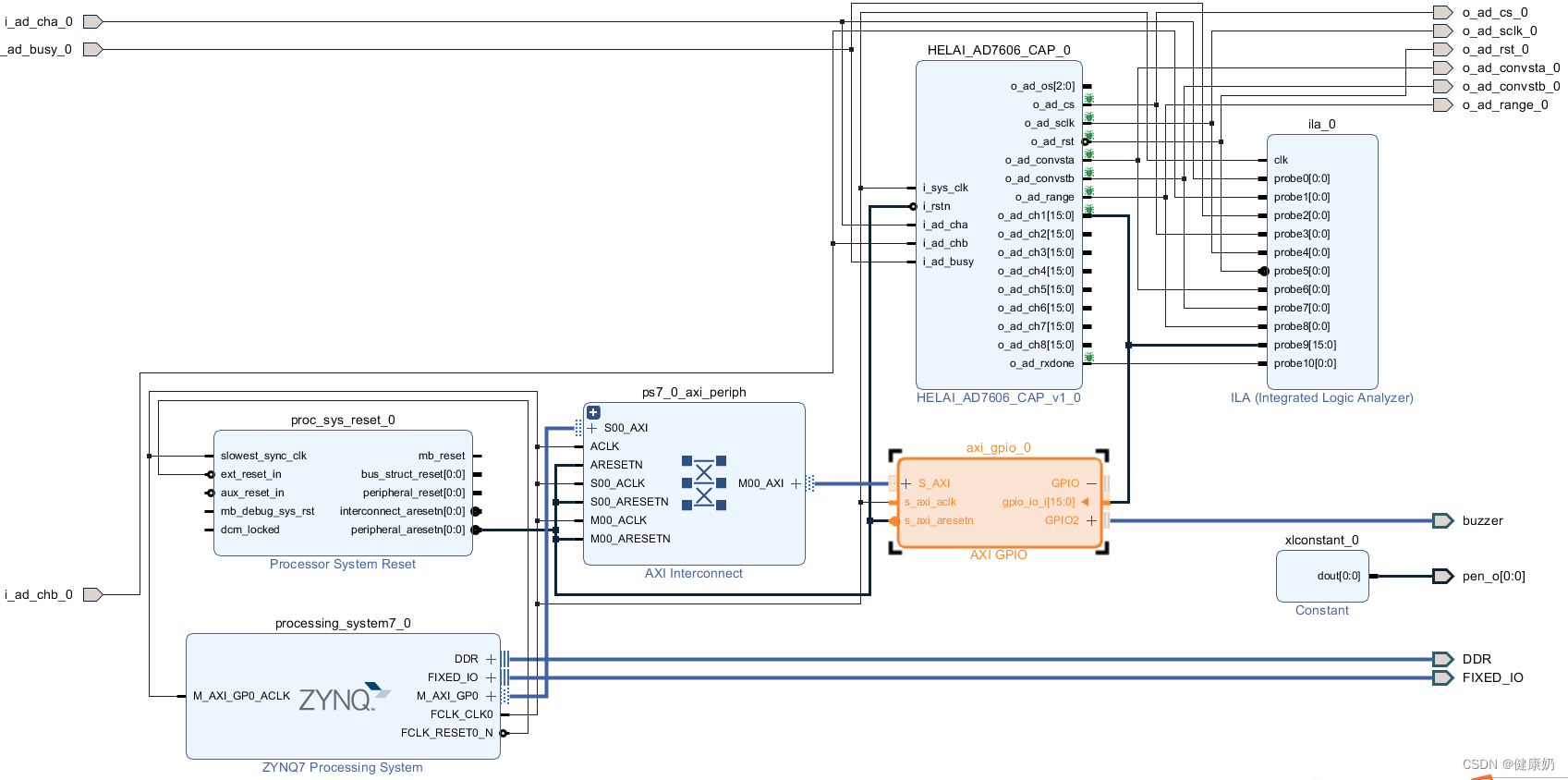
设计框图如下:
AD7606的FPGA采集部分请看我前面的文章https://blog.csdn.net/qq_41667729/article/details/124061910
不同的是,为了配合zynq使用,我把源码封装成了自定义IP,如下:
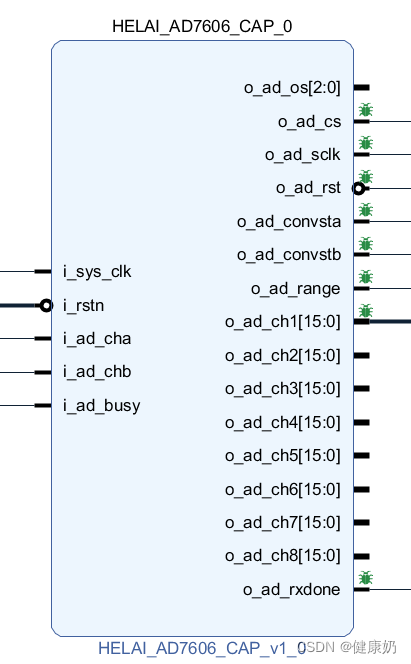
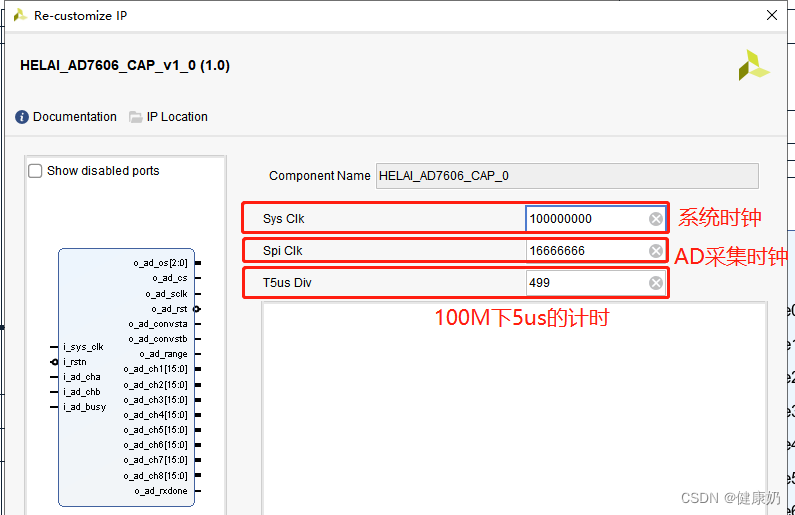
IP配置如下:
大概原理:
稳压电源输出一个电压到AD7606模块,zynq7100的PL采集数据,并做16位的并行输出;
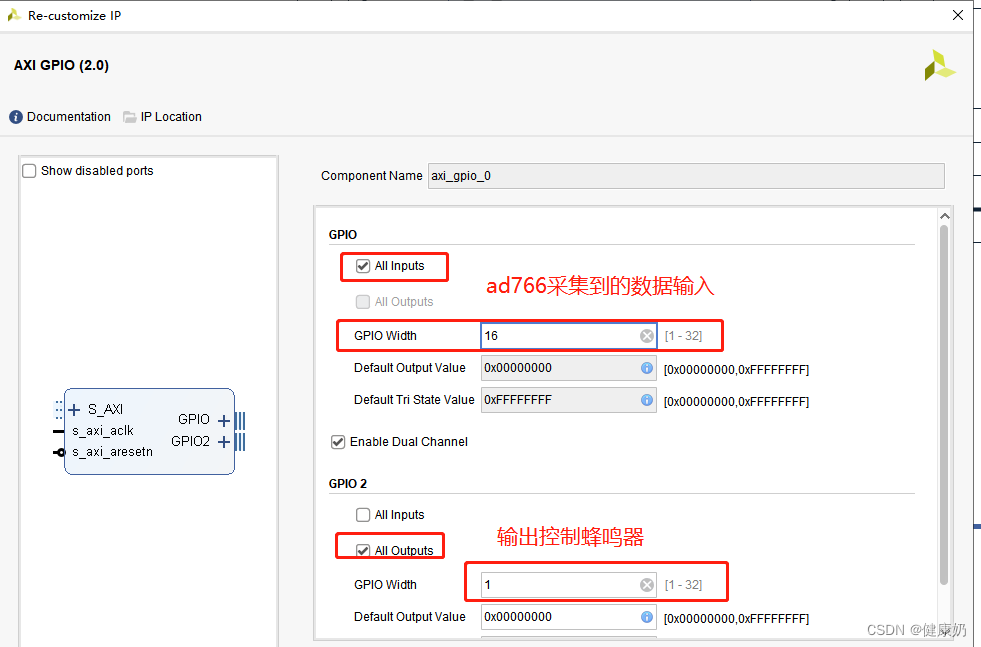
调用一个AXI GPIO的IP,BANK1设置为输入,16位,用于连接PL采集到的6位的并行数据,BANK2设置为输出,1位,用于控制蜂鸣器,蜂鸣器是有源的,给高电平触发,AXI GPIO配置如下:
最后,导出bit,加载SDK,在SDK里做浮点运算,算出实时采集到的电压值,再做比较,若采集到的电压值大于阈值,则蜂鸣器响。
BD如下图:
AD7606输入电压值得算法如下:
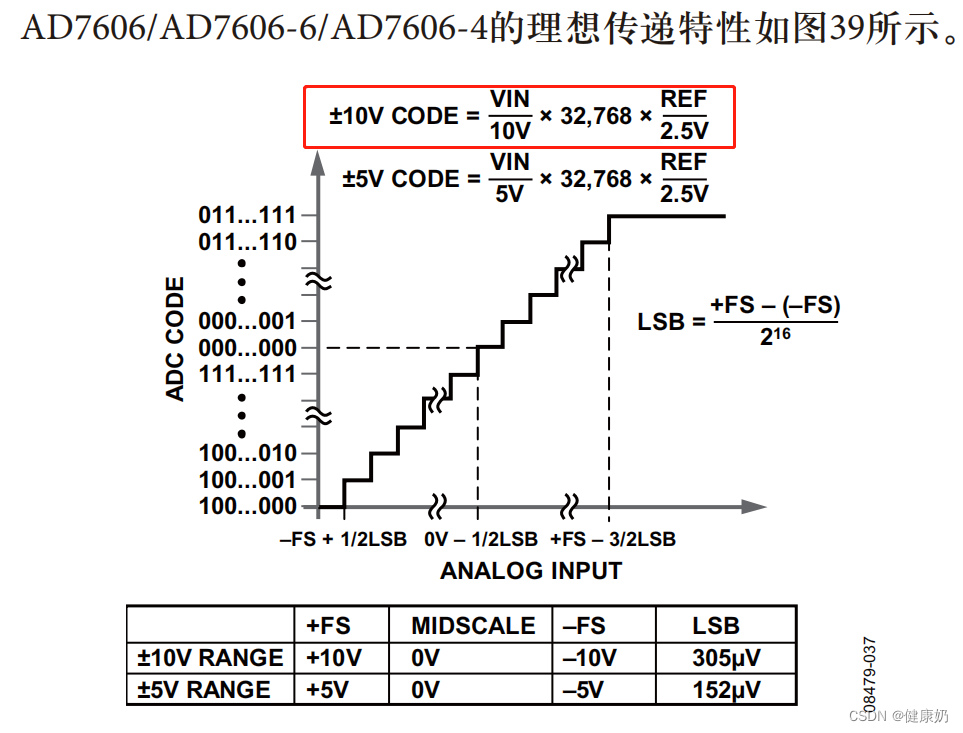
我的采集用的是±10V模式,在verilog代码里有,如图:

AD7606模块使用的是内部参考电压2.5V,所以公式中的REF/2.5V=1;
所以,根据公式自然可以得出,VIN=CODE*10/32768;其中CODE就是采集到的通道1的16位采集数据;
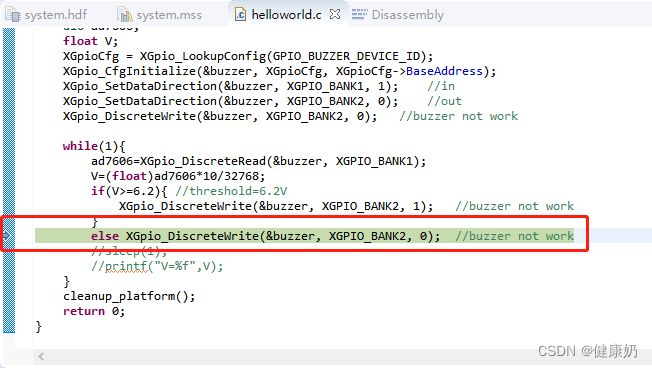
SDK主函数如下:
int main()
{
init_platform();
u16 ad7606;
float V;
XGpioCfg = XGpio_LookupConfig(GPIO_BUZZER_DEVICE_ID);
XGpio_CfgInitialize(&buzzer, XGpioCfg, XGpioCfg->BaseAddress);
XGpio_SetDataDirection(&buzzer, XGPIO_BANK1, 1); //in
XGpio_SetDataDirection(&buzzer, XGPIO_BANK2, 0); //out
XGpio_DiscreteWrite(&buzzer, XGPIO_BANK2, 0); //buzzer not work
while(1){
ad7606=XGpio_DiscreteRead(&buzzer, XGPIO_BANK1);
V=(float)ad7606*10/32768;
if(V>=6.2){ //threshold=6.2V
XGpio_DiscreteWrite(&buzzer, XGPIO_BANK2, 1); //buzzer not work
}
else XGpio_DiscreteWrite(&buzzer, XGPIO_BANK2, 0); //buzzer not work
//sleep(1);
//printf("V=%f",V);
}
cleanup_platform();
return 0;
}
我们来DEBUG一下看看效果:
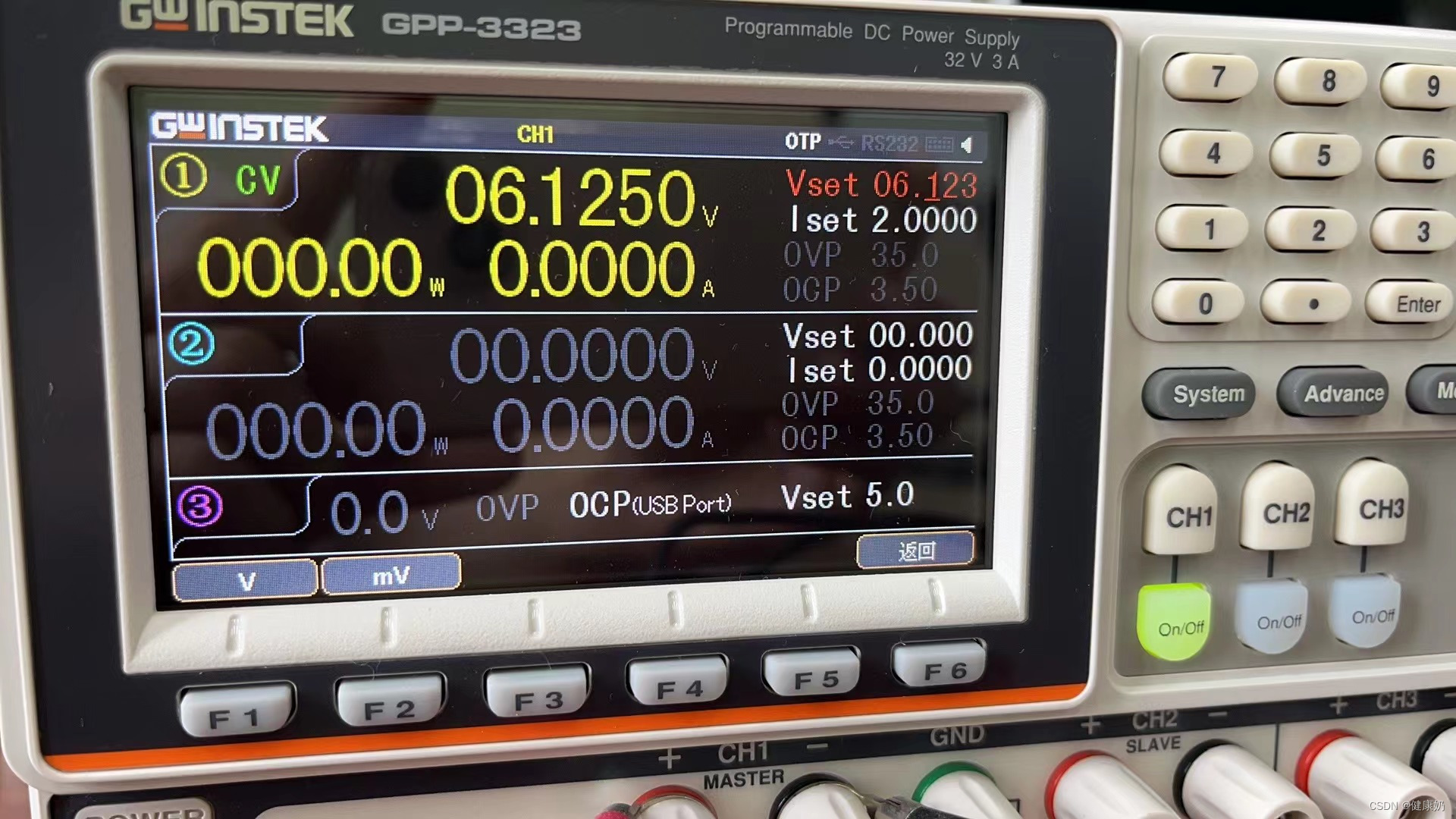
先将电源输出设置为6.125,如下:
看看此时的采集到的值:
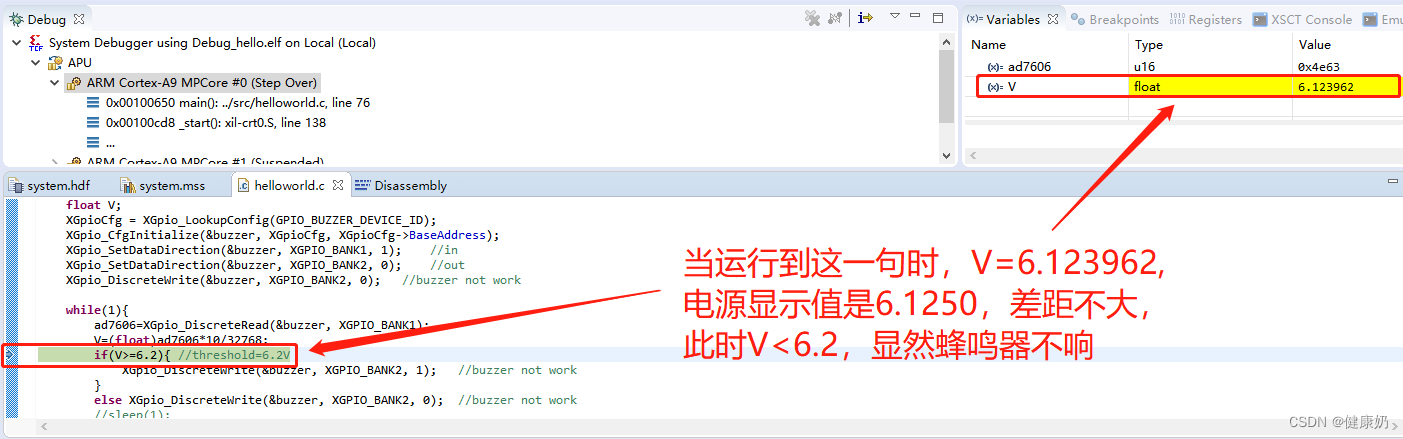
此时采集到的电压不足6.2V,再单步运行,程序跳到了蜂鸣器不工作的语句,如下:
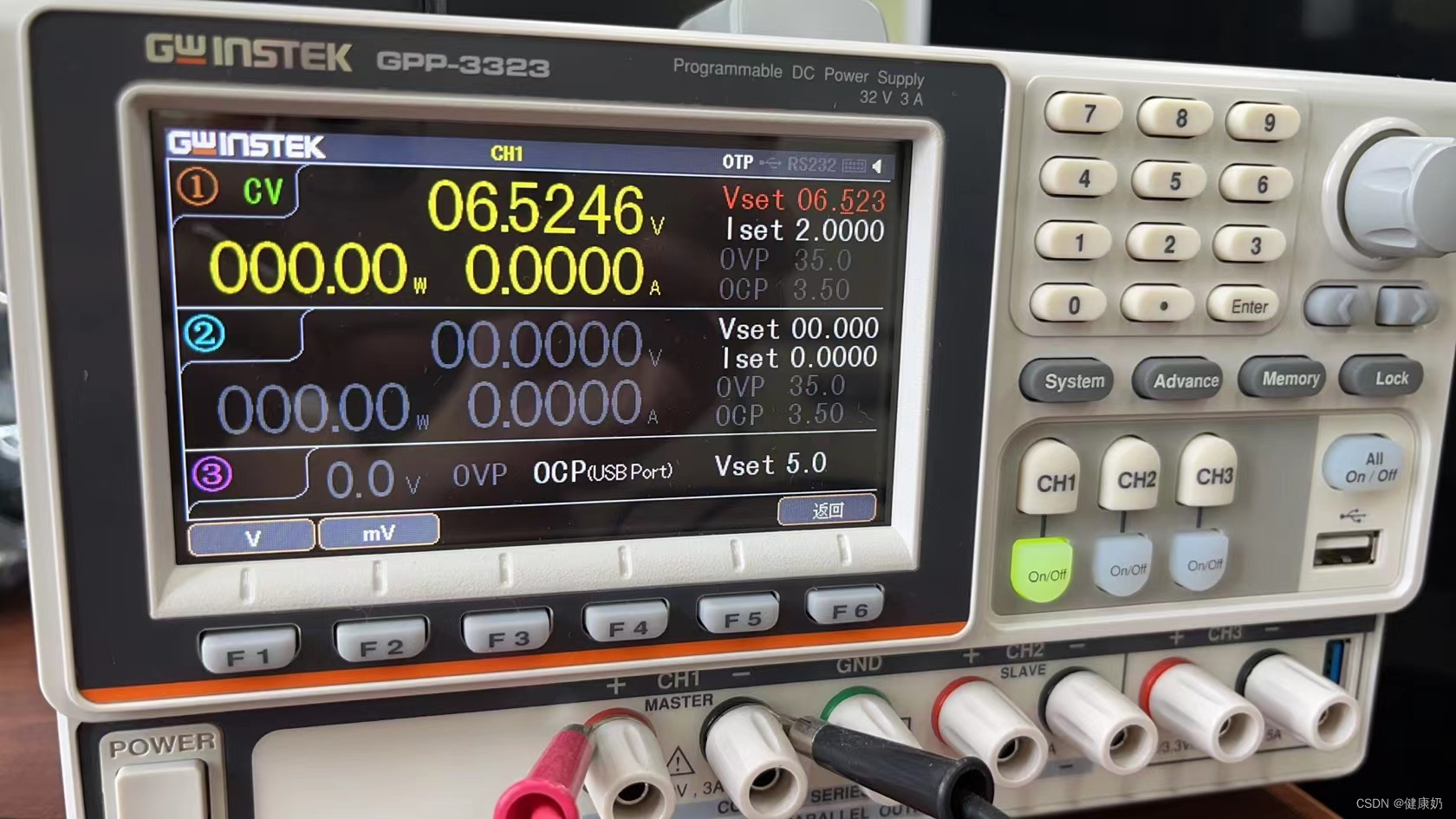
现在把电源输出调到6.5246,如下:
再来看看DEBUG,
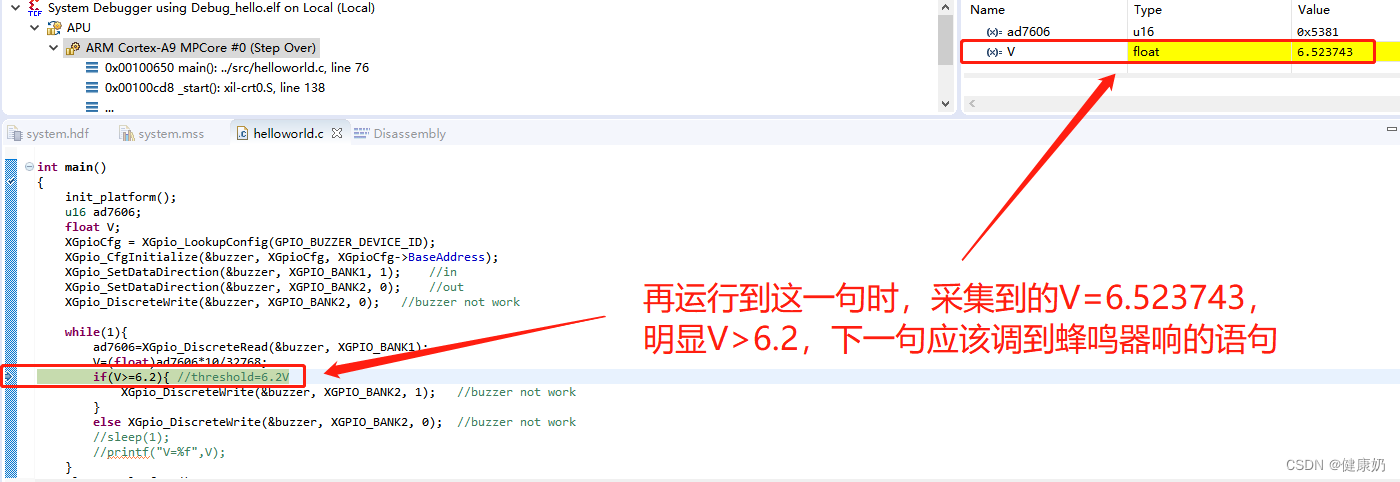
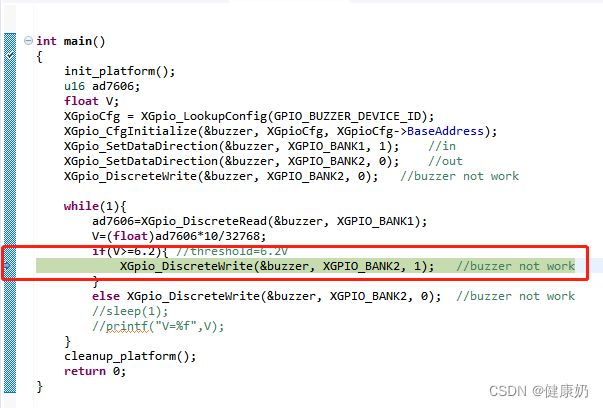
此时采集到的电压超过阈值6.2V,再单步运行,程序跳到了蜂鸣器工作的语句,如下:
注意事项:
1、AD7606采集的verilog代码,一定要认真读官方数据手册里面的几个时序图,特别是几个关键信号的持续时间,不然采集失败,不过还好,因为我已经帮你们做好了,工程拿去直接用就是,代码里也有注释,不过请原谅我数学老师教的英语注释;
2、电源输入时一定要注意电源地要和信号地共地,不然采集到的数据是乱的;
3、浮点运算时要把采集到的数据强制转换为浮点型,我不是专业搞软件的,最开始没注意,所以算出过总是没有小数点;
福利:工程代码的获取
代码太大,无法邮箱发送,以某度网盘链接方式发送,
工程源码下载链接:https://download.csdn.net/download/qq_41667729/87767253
网盘资料如下:

















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











