






文献《Obstacle Avoidance for Kinematically Redundant Manipulators in
Dynamically Varying Environments》(1985年的IJRR)
已知


为了实现避障,除了末端速度跟踪外,额外任务为距离障碍最近的点有一个避障速度,即
将(2)带入(4)

提出z

带回(2)
化简是基于

以上完成避障基本思想。
为了速度平滑,修改为

之后02年的文献《Kinematic Control Algorithms for On-Line Obstacle Avoidance for Redundant Manipulators》提出,避障只需要沿着远离障碍物的方向走即可,一维冗余即可,修改雅可比矩阵J0


因此将算法修改为

为了避免Jd0N的奇异问题,将上式修改得到一个大约解:
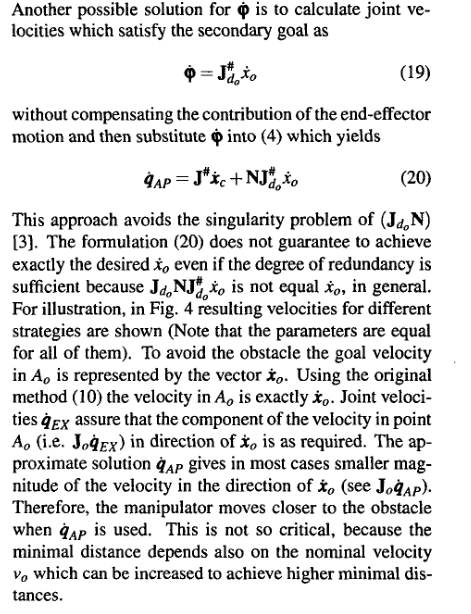
这个解与精确解并不等价,可能需要更大的逃逸速度才能实现同样的避障效果。
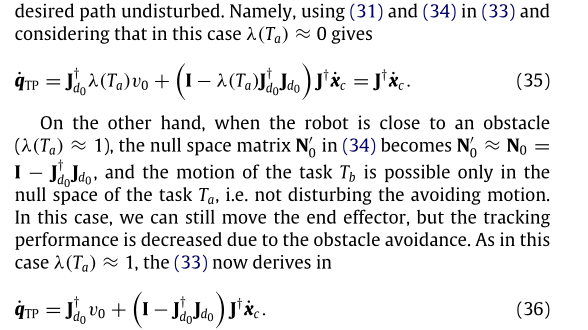
13年的文献《Smooth continuous transition between tasks on a kinematic control
level: Obstacle avoidance as a control problem》提出如果当障碍物在机械臂末端跟踪路径上时,末端跟踪速度此时不为优先级,需修改为优先躲避障碍。此处得参考任务优先级的文献:

(9)这种方法称为连续投影法.与其他增强投影方法相比,它更容易实现,在冗余分辨率中具有较少的奇异性问题,并且具有较低的计算复杂性。然而,与增强投影方法相比,连续投影方法不能确保强制严格遵守优先级顺序。
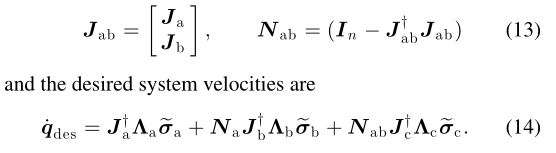
(14)即为文献《Smooth continuous transition between tasks on a kinematic control
level: Obstacle avoidance as a control problem》提到的增强投影法。两个方法在文献《
Stability Analysis for Prioritized Closed-Loop Inverse Kinematic Algorithms for Redundant Robotic Systems》(tro的文章 nb)中讨论比较。
为了躲避末端路径上的障碍,将躲避障碍的优先级提高。不遇到障碍时,优先完成跟踪末端速度的第二任务,遇到时,则先避障。

至此看的关于避障的文献到此为止。
此外还有国内的一篇研究生论文是将雅可比分段,按照避障点的位置前后分段来实现一些算法,很新奇也很不错。















 5631
5631











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









