







目录
1.函数作用
计算特征点的方向,这里是返回角度作为方向
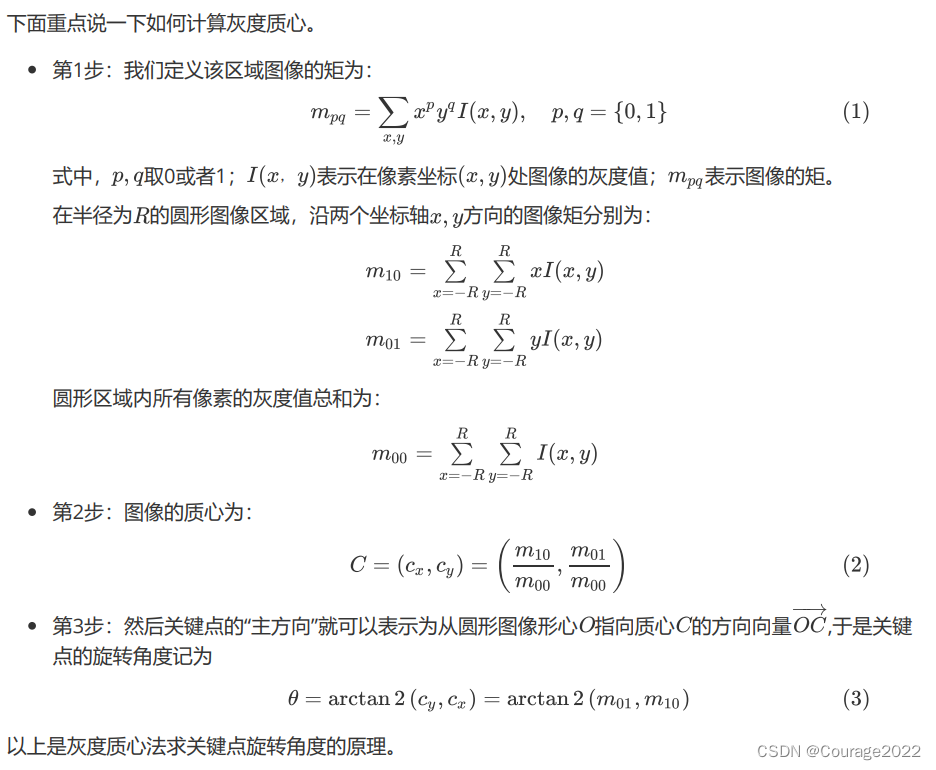
2. 灰度质心法数学基础
在旋转方面,我们计算特征点附近的图像灰度质心。所谓质心是指以图像块灰度值作为权重的中心。其具体操作步骤如下:
1.在一个小的图像块中,定义图像块的矩为
2.通过矩可以找到图像块的质心:
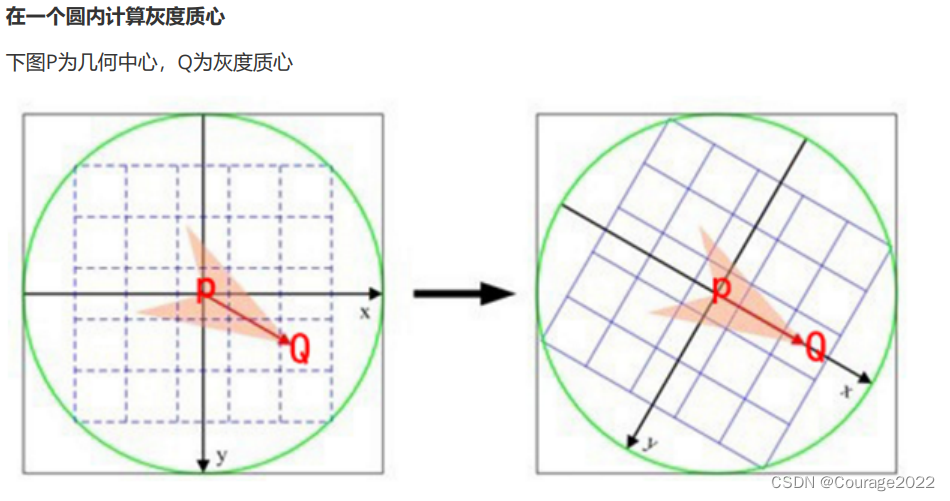
3.连接图像块的几何中心
与质心
,得到一个方向向量
,于是特征点的方向可以定义为
通过以上方法,FAST角点便具有了尺度与旋转的描述,从而大大提升了其在不同图像之间表述的鲁棒性。所以在ORB中,把这种改进后的FAST称为Oriented FASR。
3.代码解析
3.1 源代码
/** * @brief 这个函数用于计算特征点的方向,这里是返回角度作为方向。 * 计算特征点方向是为了使得提取的特征点具有旋转不变性。 * 方法是灰度质心法:以几何中心和灰度质心的连线作为该特征点方向 * @param[in] image 要进行操作的某层金字塔图像 * @param[in] pt 当前特征点的坐标 * @param[in] u_max 图像块的每一行的坐标边界 u_max * @return float 返回特征点的角度,范围为[0,360)角度,精度为0.3° */ static float IC_Angle(const Mat& image, Point2f pt, const vector<int> & u_max) { //图像的矩,前者是按照图像块的y坐标加权,后者是按照图像块的x坐标加权 int m_01 = 0, m_10 = 0; //获得这个特征点所在的图像块的中心点坐标灰度值的指针center const uchar* center = &image.at<uchar> (cvRound(pt.y), cvRound(pt.x)); // Treat the center line differently, v=0 //这条v=0中心线的计算需要特殊对待 //后面是以中心行为对称轴,成对遍历行数,所以PATCH_SIZE必须是奇数 for (int u = -HALF_PATCH_SIZE; u <= HALF_PATCH_SIZE; ++u) //注意这里的center下标u可以是负的!中心水平线上的像素按x坐标(也就是u坐标)加权 m_10 += u * center[u]; int step = (int)image.step1(); //注意这里是以v=0中心线为对称轴,然后对称地每成对的两行之间进行遍历,这样处理加快了计算速度 for (int v = 1; v <= HALF_PATCH_SIZE; ++v) { // Proceed over the two lines //本来m_01应该是一列一列地计算的,但是由于对称以及坐标x,y正负的原因,可以一次计算两行 int v_sum = 0; // 获取某行像素横坐标的最大范围,注意这里的图像块是圆形的! int d = u_max[v]; //在坐标范围内挨个像素遍历,实际是一次遍历2个 // 假设每次处理的两个点坐标,中心线下方为(x,y),中心线上方为(x,-y) // 对于某次待处理的两个点:m_10 = Σ x*I(x,y) = x*I(x,y) + x*I(x,-y) = x*(I(x,y) + I(x,-y)) // 对于某次待处理的两个点:m_01 = Σ y*I(x,y) = y*I(x,y) - y*I(x,-y) = y*(I(x,y) - I(x,-y)) for (int u = -d; u <= d; ++u) { //得到需要进行加运算和减运算的像素灰度值 //val_plus:在中心线下方x=u时的的像素灰度值 //val_minus:在中心线上方x=u时的像素灰度值 int val_plus = center[u + v*step], val_minus = center[u - v*step]; //在v(y轴)上,2行所有像素灰度值之差 v_sum += (val_plus - val_minus); //u轴(也就是x轴)方向上用u坐标加权和(u坐标也有正负符号),相当于同时计算两行 m_10 += u * (val_plus + val_minus); } //将这一行上的和按照y坐标加权 m_01 += v * v_sum; } //为了加快速度还使用了fastAtan2()函数,输出为[0,360)角度,精度为0.3° return fastAtan2((float)m_01, (float)m_10); }
3.2 源代码解析
首先我们要返回的是角度,即
,于是我们的核心任务就是求y方向的矩
和x方向的矩
。
我们先拿取特征点所在的图像块特征点的中心点坐标灰度值的指针center,由于半径所在灰度质心圆的一条线的v=0,因此我们先算半径的
for (int u = -HALF_PATCH_SIZE; u <= HALF_PATCH_SIZE; ++u) //注意这里的center下标u可以是负的!中心水平线上的像素按x坐标(也就是u坐标)加权 m_10 += u * center[u];我们定义了每行的步长step,这个的作用是图像一行像素的字节数,举个例子,图像第一行第一个像素的位置 + 1*step 就能得到图像第二行第一个像素的位置。
我们从v=1到v= HALF_PATCH_SIZE 计算x、y方向的矩。下面我们来解释这段代码:
// Proceed over the two lines //本来m_01应该是一列一列地计算的,但是由于对称以及坐标x,y正负的原因,可以一次计算两行 int v_sum = 0; // 获取某行像素横坐标的最大范围,注意这里的图像块是圆形的! int d = u_max[v]; //在坐标范围内挨个像素遍历,实际是一次遍历2个 // 假设每次处理的两个点坐标,中心线下方为(x,y),中心线上方为(x,-y) // 对于某次待处理的两个点:m_10 = Σ x*I(x,y) = x*I(x,y) + x*I(x,-y) = x*(I(x,y) + I(x,-y)) // 对于某次待处理的两个点:m_01 = Σ y*I(x,y) = y*I(x,y) - y*I(x,-y) = y*(I(x,y) - I(x,-y)) for (int u = -d; u <= d; ++u) { //得到需要进行加运算和减运算的像素灰度值 //val_plus:在中心线下方x=u时的的像素灰度值 //val_minus:在中心线上方x=u时的像素灰度值 int val_plus = center[u + v*step], val_minus = center[u - v*step]; //在v(y轴)上,2行所有像素灰度值之差 v_sum += (val_plus - val_minus); //u轴(也就是x轴)方向上用u坐标加权和(u坐标也有正负符号),相当于同时计算两行 m_10 += u * (val_plus + val_minus); } //将这一行上的和按照y坐标加权 m_01 += v * v_sum;
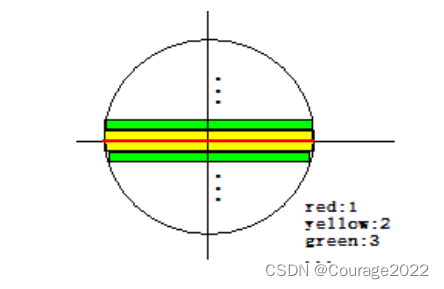
这段代码我们从-d到d循环一次,即半径循环一次,一次计算对称的两行的矩,算法如下:
对于某次待处理的两个点:m_10 = Σ x*I(x,y) = x*I(x,y) + x*I(x,-y) = x*(I(x,y) + I(x,-y))
对于某次待处理的两个点:m_01 = Σ y*I(x,y) = y*I(x,y) - y*I(x,-y) = y*(I(x,y) - I(x,-y))m_10 += u * (val_plus + val_minus);这句代码是对每一行的上下两部分求x的矩。
由于y在每次循环取值相等,于是我们用临时变量v_sum 累加一行的灰度值,然后乘以y值就可以,简化了计算。
然后利用opencv的函数快速计算角度值返回给调用函数即可。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











