






Ceres实现位姿优化代码详解(基于BA求解pnp问题)
Ceres计算最小化重投影误差:重载operator()
-
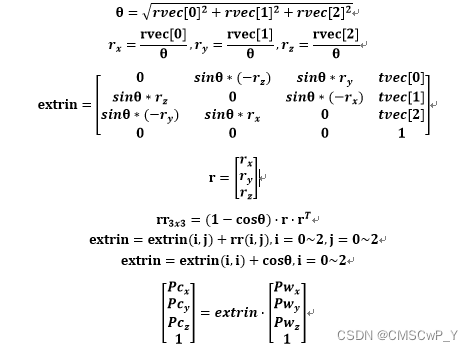
对3D坐标Pw进行坐标变换,换算到相机坐标系下
-
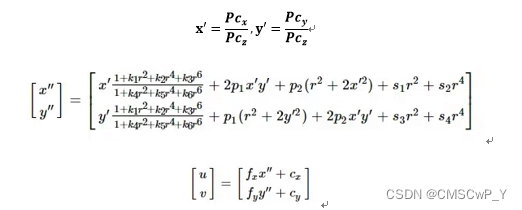
将3D坐标投影至图像坐标系下(畸变矫正)
-
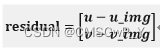
计算投影点与图像点的误差
-
最小化30个投影点与图像点的重投影误差之和
参考:
ceres实现的pnp解算后的位姿优化代码详解
Ceres的Problem::AddResidualBlock()函数
Ceres Solver 入门教程
【SLAM】Ceres优化库超详细解析
struct ZCostFunctorPnP
{
std::vector<float> object_point_;
std::vector<float> image_point_;
std::vector< std::vector<double> > K_; // fx, fy, cx, cy
std::vector<double> D_; // k1, k2, p1, p2, k3, k4, k5, k6
double *tra_;
ZCostFunctorPnP( std::vector<float> objpoint, std::vector<float> imgpoint, std::vector< std::vector<double> > camera_intrinsic, std::vector<double> dist_coeffs,double *tra):
object_point_(objpoint), image_point_(imgpoint), K_(camera_intrinsic), D_(dist_coeffs),tra_(tra){}
template<typename T>
bool operator()(const T* const rot, const T* const tra, T* residual) const
{
T point_in[3]; // 真实世界3D点坐标
T point_out[3]; // 相机坐标系3D点坐标
point_in[0] = T(object_point_[0]);
point_in[1] = T(object_point_[1]);
point_in[2] = T(object_point_[2]);
// 对3D点坐标进行坐标变换,换算到相机坐标系下
// rotation
T theta=sqrt(rot[0]*rot[0]+rot[1]*rot[1]+rot[2]*rot[2]);
T rx=rot[0]/theta;
T ry=rot[1]/theta;
T rz=rot[2]/theta;
Eigen::Matrix<T,4,4> extrin;
extrin(0,0)=T(0.0);
extrin(0,1)=sin(theta)*(-rz);
extrin(0,2)=sin(theta)*(ry);
extrin(0,3)=T(tra_[0]);
extrin(1,0)=sin(theta)*(rz);
extrin(1,1)=T(0.0);
extrin(1,2)=sin(theta)*(-rx);
extrin(1,3)=T(tra_[1]);
extrin(2,0)=sin(theta)*(-ry);
extrin(2,1)=sin(theta)*(rx);
extrin(2,2)=T(0.0);
extrin(2,3)=T(tra_[2]);
extrin(3,0)=T(0.0);
extrin(3,1)=T(0.0);
extrin(3,2)=T(0.0);
extrin(3,3)=T(1.0);
Eigen::Matrix<T,3,1> r;
r(0,0)=rx;
r(1,0)=ry;
r(2,0)=rz;
Eigen::Matrix<T,3,3> rr=(T(1.0)-cos(theta))*r*r.transpose();
for(int i=0;i<3;i++)
for(int j=0;j<3;j++)
extrin(i,j)+=rr(i,j);
for(int i=0;i<3;i++)
extrin(i,i)+=cos(theta);
extrin=extrin.inverse().eval();
Eigen::Matrix<T,4,1> pt_in;
pt_in(0,0)=point_in[0];
pt_in(1,0)=point_in[1];
pt_in(2,0)=point_in[2];
pt_in(3,0)=T(1.0);
Eigen::Matrix<T,4,1> pt_out=extrin*pt_in;
point_out[0]=pt_out(0,0);
point_out[1]=pt_out(1,0);
point_out[2]=pt_out(2,0);
// projection
T x = point_out[0] / point_out[2];
T y = point_out[1] / point_out[2];
// undistortation with dist coefficients as [k1, k2, p1, p2, k3, k4, k5, k6]
// if (!D_empty())
T r2 = x * x + y * y;
T xy = x * y;
// 畸变矫正计算公式
x = x * (1.0 + D_[0] * r2 + D_[1] * r2 * r2 + D_[4] * r2* r2* r2)/(1.0 + D_[5] * r2 + D_[6] * r2 * r2 + D_[7] * r2* r2* r2) + 2.0 * xy * D_[2]
+ (r2 + 2.0*x * x) * D_[3];
y = y * (1.0 + D_[0] * r2 + D_[1] * r2 * r2 + D_[4] * r2* r2* r2)/(1.0 + D_[5] * r2 + D_[6] * r2 * r2 + D_[7] * r2* r2* r2) + 2.0 * xy * D_[3]
+ (r2 + 2.0*y * y) * D_[2];
// 坐标归一化并转换到图像坐标系下
// to image plane
T u = x * K_[0][0] + K_[0][2]; // x * fx + cx
T v = y * K_[1][1] + K_[1][2]; // x * fy + cy
T u_img = T(image_point_[0]);
T v_img = T(image_point_[1]);
// 计算投影点与图像点的误差
residual[0] = u - u_img;
residual[1] = v - v_img;
// std::cout<<"residual: "<<residual[0]<<','<<residual[1]<<std::endl;
return true;
}
static ceres::CostFunction* create( std::vector<float> objpoint,
std::vector<float> imgpoint, std::vector< std::vector<double> > camera_intrinsic, std::vector<double> dist_coeffs,double *tra)
{
return new ceres::AutoDiffCostFunction<ZCostFunctorPnP, 2, 3, 3> // Dimension of residual; Dimension of x(rvec); Dimension of y(tvec)
(new ZCostFunctorPnP(objpoint, imgpoint, camera_intrinsic, dist_coeffs,tra));
}
};
/*
obj_pts: 圆心的真实世界坐标
imgpts2d:圆心的图像坐标
intrinsic: 内参矩阵[[fx, 0, cx], [0, fy, cy], [0, 0, 1]]
distortion_coeffs: 畸变矫正参数[k1, k2, p1, p2, k3, k4, k5, k6]
rvec: 旋转向量,需要随机初始化,且初始值不能为0
tvec: 平移向量,需要随机初始化,且初始值不能为0
*/
bool solveCamPnP(std::vector< std::vector<float> >& objpoints, std::vector< std::vector<float> >& imgpoints,
std::vector< std::vector<double> >& camera_intrinsic, std::vector<double>& dist_coeffs, std::vector<float>& rvec, std::vector<float>& tvec){
double rot[3];
double tra[3];
rot[0] = rvec[0];
rot[1] = rvec[1];
rot[2] = rvec[2];
tra[0] = tvec[0];
tra[1] = tvec[1];
tra[2] = tvec[2];
ceres::Problem problem;
for (int i = 0; i < imgpoints.size(); i++) // 要求每行存储一个关键点的坐标
{
// 使用30个圆心构建最小二乘问题
ceres::CostFunction* cost = ZCostFunctorPnP::create(objpoints[i], imgpoints[i], camera_intrinsic, dist_coeffs, tra);
problem.AddResidualBlock(cost, nullptr, rot, tra); // costFunction, lossFunction,parameterBlock
}
// 设置优化器参数及优化方法
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_SCHUR;
options.max_num_iterations = 80;
options.trust_region_strategy_type = ceres::LEVENBERG_MARQUARDT;
options.minimizer_progress_to_stdout = false;
// 调用求解器进行优化
ceres::Solver::Summary summary; // 用于存放日志
ceres::Solve(options, &problem, &summary); // 构建雅可比矩阵
std::cout << summary.FullReport() << std::endl;
// 对优化后的rvec和tvec进行赋值还原
rvec[0] = rot[0];
rvec[1] = rot[1];
rvec[2] = rot[2];
tvec[0] = tra[0];
tvec[1] = tra[1];
tvec[2] = tra[2];
return true;
}
bool solveLidarPnP(std::vector< std::vector<float> >& objpoints, std::vector< std::vector<float> >& lidarpoints,
std::vector<float>& rvec, std::vector<float>& tvec){
double rot[3];
double tra[3];
rot[0] = rvec[0];
rot[1] = rvec[1];
rot[2] = rvec[2];
tra[0] = tvec[0];
tra[1] = tvec[1];
tra[2] = tvec[2];
ceres::Problem problem;
for (int i = 0; i < lidarpoints.size(); i++)
{
ceres::CostFunction* cost = YCostFunctorPnP::create(objpoints[i], lidarpoints[i],tra);
problem.AddResidualBlock(cost, nullptr, rot, tra);
}
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_SCHUR;
options.max_num_iterations = 80;
options.trust_region_strategy_type = ceres::LEVENBERG_MARQUARDT;
options.minimizer_progress_to_stdout = false;
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
rvec[0] = rot[0];
rvec[1] = rot[1];
rvec[2] = rot[2];
tvec[0] = tra[0];
tvec[1] = tra[1];
tvec[2] = tra[2];
return true;
}















 605
605











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









