






前言:重新拾起Slam这本书,仔细阅读发现之前有很多一知半解的代码与算法不是很清楚,写这篇博客的目的就是希望自己可以吃透Ceres BA算法的流程。
最主要的部分是Ceres的计算误差的接口
想要理清思路,那么利用逆向思维或许是一种不错的方法。
首先先贴一大段slam十四讲中的代码(方便我复制粘贴,初见的话粗糙的浏览一边即可
#ifndef SnavelyReprojection_H
#define SnavelyReprojection_H
#include <iostream>
#include "ceres/ceres.h"
#include "rotation.h"
class SnavelyReprojectionError {
public:
SnavelyReprojectionError(double observation_x, double observation_y) : observed_x(observation_x),
observed_y(observation_y) {}
template<typename T>
bool operator()(const T *const camera,
const T *const point,
T *residuals) const {
// camera[0,1,2] are the angle-axis rotation
T predictions[2];
CamProjectionWithDistortion(camera, point, predictions);
residuals[0] = predictions[0] - T(observed_x);
residuals[1] = predictions[1] - T(observed_y);
return true;
}
// camera : 9 dims array
// [0-2] : angle-axis rotation
// [3-5] : translateion
// [6-8] : camera parameter, [6] focal length, [7-8] second and forth order radial distortion
// point : 3D location.
// predictions : 2D predictions with center of the image plane.
template<typename T>
static inline bool CamProjectionWithDistortion(const T *camera, const T *point, T *predictions) {
// Rodrigues' formula
T p[3];
AngleAxisRotatePoint(camera, point, p);
// camera[3,4,5] are the translation
p[0] += camera[3];
p[1] += camera[4];
p[2] += camera[5];
// Compute the center fo distortion
T xp = -p[0] / p[2];
T yp = -p[1] / p[2];
// Apply second and fourth order radial distortion
const T &l1 = camera[7];
const T &l2 = camera[8];
T r2 = xp * xp + yp * yp;
T distortion = T(1.0) + r2 * (l1 + l2 * r2);
const T &focal = camera[6];
predictions[0] = focal * distortion * xp;
predictions[1] = focal * distortion * yp;
return true;
}
static ceres::CostFunction *Create(const double observed_x, const double observed_y) {
return (new ceres::AutoDiffCostFunction<SnavelyReprojectionError, 2, 9, 3>(
new SnavelyReprojectionError(observed_x, observed_y)));
}
private:
double observed_x;
double observed_y;
};
#endif // SnavelyReprojection.h① 首先来看一下最后这段代码,很明显整大段代码都是在为这一小段代码服务。
static ceres::CostFunction *Create(const double observed_x, const double observed_y) {
return (new ceres::AutoDiffCostFunction<SnavelyReprojectionError, 2, 9, 3>(
new SnavelyReprojectionError(observed_x, observed_y)));
}②SnavelyReprojectionError函数如下所示,其目的就是通过重载()的方法来求得估计值与真实值(也称观测值)之间的误差
class SnavelyReprojectionError {
public:
SnavelyReprojectionError(double observation_x, double observation_y) : observed_x(observation_x),
observed_y(observation_y) {}
template<typename T>
bool operator()(const T *const camera,
const T *const point,
T *residuals) const {
// camera[0,1,2] are the angle-axis rotation
T predictions[2];
CamProjectionWithDistortion(camera, point, predictions);
residuals[0] = predictions[0] - T(observed_x);
residuals[1] = predictions[1] - T(observed_y);
return true;
}
因为是在二维平面上,所以点的x,y坐标的投影误差都要求出来。
③这一段中解释了camera数组中各个区间代表了什么数据,每个相机有六维的姿态,一维的焦距和两维的畸变参数。
// camera : 9 dims array
// [0-2] : angle-axis rotation
// [3-5] : translateion
// [6-8] : camera parameter, [6] focal length, [7-8] second and forth order radial distortion
// point : 3D location.
// predictions : 2D predictions with center of the image plane. static inline bool CamProjectionWithDistortion(const T *camera, const T *point, T *predictions) {
// Rodrigues' formula
T p[3];
AngleAxisRotatePoint(camera, point, p);
// camera[3,4,5] are the translation
p[0] += camera[3];
p[1] += camera[4];
p[2] += camera[5];
// Compute the center fo distortion
T xp = -p[0] / p[2];
T yp = -p[1] / p[2];
// Apply second and fourth order radial distortion
const T &l1 = camera[7];
const T &l2 = camera[8];
T r2 = xp * xp + yp * yp;
T distortion = T(1.0) + r2 * (l1 + l2 * r2);
const T &focal = camera[6];
predictions[0] = focal * distortion * xp;
predictions[1] = focal * distortion * yp;
return true;
}④:很明显,这一段就是根据相机参数来求点投影的估计值
⑤:
// Compute the center fo distortion
T xp = -p[0] / p[2];
T yp = -p[1] / p[2];
T r2 = xp * xp + yp * yp;
T distortion = T(1.0) + r2 * (l1 + l2 * r2);xp与yp可以理解为归一化之后点的坐标,那么这个值等于xp^2+yp^2的r2又是什么呢?
考虑到归一化平面上的任意一点p,他的坐标为[x,y]T,也可以写成极坐标的形式[r,
],其中r表示点p与坐标系原点之间的距离。
由极坐标公式我们便可得出:r=x*x+y*y 这个r也是我们在求纵向畸变时所需要用到的参数。
以下为SLAM14讲中关于畸变的部分。在BA优化的时候,明显可以看出代码中忽视了切向畸变的影响(估计是对结果影响不大),同时径向畸变也仅仅是算到了r^4这个数量级。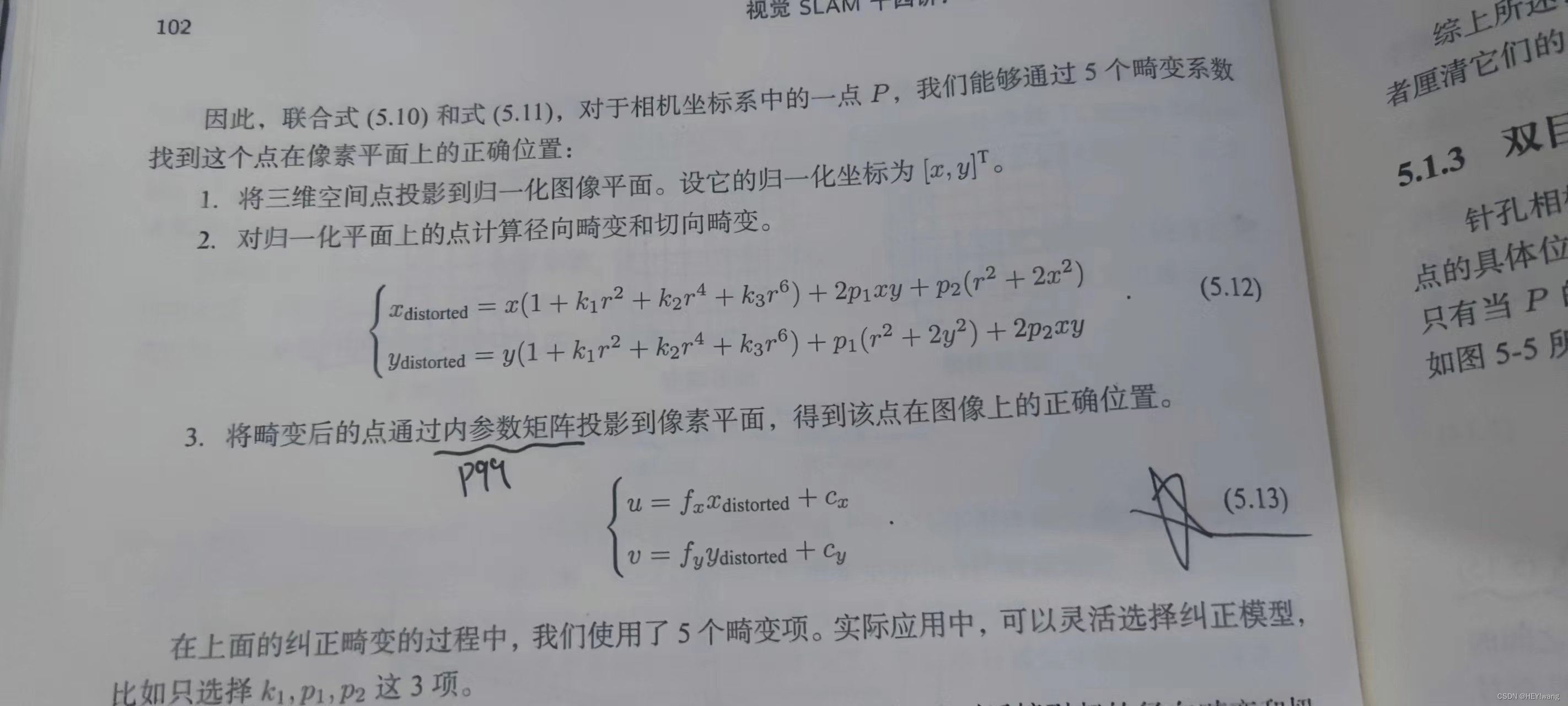















 2273
2273

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









