







放大点云单个坐标系的值,便于观察
import open3d as o3d
import numpy as np
pcd = o3d.io.read_point_cloud("aaa.pcd")
vis = o3d.visualization.Visualizer()
vis.create_window(window_name='可视化', width=800, height=600)
opt = vis.get_render_option()
opt.background_color = np.asarray([0, 0, 0]) # 设置背景色*****
point = np.asarray(pcd.points)#获取点云坐标
for i in point:# i[0]-x坐标 i[1]-y坐标 i[2]-z坐标
i[2] = i[2]*10# Z坐标放大10倍
print(point)
o3d.io.write_point_cloud("fangda.pcd", pcd)
vis.add_geometry(pcd) # 加载点云到可视化窗口
vis.run() # 激活显示窗口,这个函数将阻塞当前线程,直到窗口关闭。
vis.destroy_window() # 销毁窗口,这个函数必须从主线程调用。
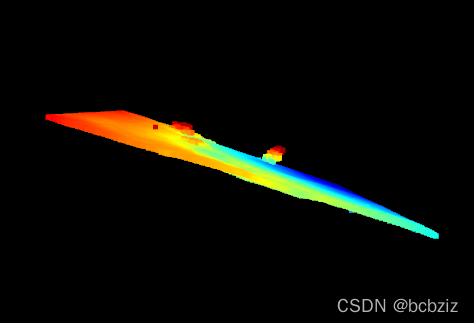
原始点云
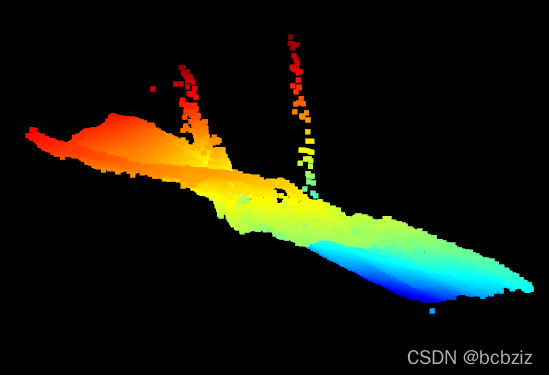
放大后














 189
189











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









